
NVIDIA DRIVE Constellation で、自動運転車の開発と検証に向けた忠実度の高いエンドツーエンドのシミュレーションを実現。
世界の大部分が在宅で業務を続ける中、NVIDIA のテスト用自動運転車はクラウド上で働き続けています。
GTC 2020 基調講演の中で、NVIDIA の 創業者 / CEO であるジェンスン フアン (Jensen Huang) は、NVIDIA DRIVE の技術がシミュレーションを活用し、開発され、テストされている事を紹介しました。物理的なテストが一時的に中断しているにも関わらず、クラウドベースの NVIDIA DRIVE Constellation プラットフォームを用いて仮想環境に仮想車両を送り出し、自動運転技術を進歩させ続けています。
デモ動画の中で、仮想の NVIDIA BB8 テスト車両は、シリコンバレーにある NVIDIA 本社近くの幹線道路や市街の道を走行しています。これはすべてシミュレーションです。この 17 マイルに及ぶ環状道路の、きわめて正確なレプリカ環境内で NVIDIA DRIVE AV ソフトウェアが、歩行者や交通車両を避けて走行する様子を見ることができます。
データセンターの実験場
NVIDIA DRIVE Constellation はクラウドベースのシミュレーション プラットフォームであり、自動運転車の開発と検証を支援するために一から設計されました。データセンターを拠点とするこのプラットフォームは、並べて設置される2台のサーバーで構成されています。
1 台目のサーバーは、NVIDIA GPU を使って DRIVE Sim ソフトウェアを実行し、仮想世界の中を走る仮想車両からのセンサー出力を生成します。2 台目のサーバーは実際の車載コンピューターを搭載しており、シミュレートされたセンサー データを処理して、本物の車に配備されているのと全く同じ DRIVE AV および DRIVE IX ソフトウェアを実行します。
2 台目のサーバーによる走行判断が 1 台目にフィードバックされ、ビットレベルの精度を持ち、リアルタイム実行が可能なHardware-in-the-Loop を用いた開発と検証を実現します。

DRIVE Constellation は、並べて設置される2 台のサーバーで構成されており、ビットレベルの精度を持つ Hardware-in-the-Loop テストが可能
このシステムは、スケーラブルな仮想フリートとしてデータセンターで展開できるように設計されています。これによって開発エンジニアは必要に応じて車両を使えるようになり、大規模なテストを実施できるようになります。また、現実世界ではめったに起こらない、あり得ないような稀で危険なシナリオも、一貫してテストできます。
エンドツーエンドの開発とテスト
自動運転車の開発では、サブシステムから始まり、車両全体の結合テストに至るまで、あらゆる段階でのテストが必要になります。DRIVE Constellation は、このようなエンドツーエンドの開発とテストをシミュレーション内で実現し、物理的な車両を用いた場合と同じように開発を行う事ができます。
エンドツーエンドのテストでは、タイミングと動作を正確に合わせるだけでなく、自動運転車ソフトウェア内で複雑に依存しあう個別のシステムを正確にモデル化することができます。

DRIVE Sim は現実世界のデジタル ツインを作り出し、リアリスティックな運転環境を提供
このレベルの忠実度を大規模に実現するのは大変な作業です。周辺環境や、周辺車両の動き、センサー入力、車両力学が必要で、車載コンピューターへのフィードバックは、現実世界と同じようにならなければなりません。
そのためには、多数の GPU が正確なタイミングに合わせて合成データを生成する必要があります。車両のソフトウェア、ハードウェアの信号、インターフェースをシミュレーションの中で再現しなければならず、しかもすべてリアルタイムで実行することが求められます。
シリコンバレーをシミュレートする
包括的なシミュレーションは、環境から始まります。シリコンバレーの環状道路を正確に再現するために、NVIDIA DRIVE エコシステムのメンバーである 3D Mapping は、車道を 5 センチメートル単位の精度でスキャンしました。その生のスキャン データは次に、OpenDRIVE と呼ばれるデータセット フォーマットに処理されました。
それを受けて、NVIDIA はコンテンツ作成パイプラインを開発し、NVIDIA Omniverse コラボレーション プラットフォームを使ってきわめて正確な 3D 環境を生成しました。この環境には道路網や路面標示も正確に表現されており、物理世界の本物のセンサーと同様に光線、電波、ライダーの光との相互作用が起こるように、マテリアルのプロパティも適用されています。

DRIVE Sim では、車内ビジュアライゼーションを含め、エンドツーエンドのテストが可能
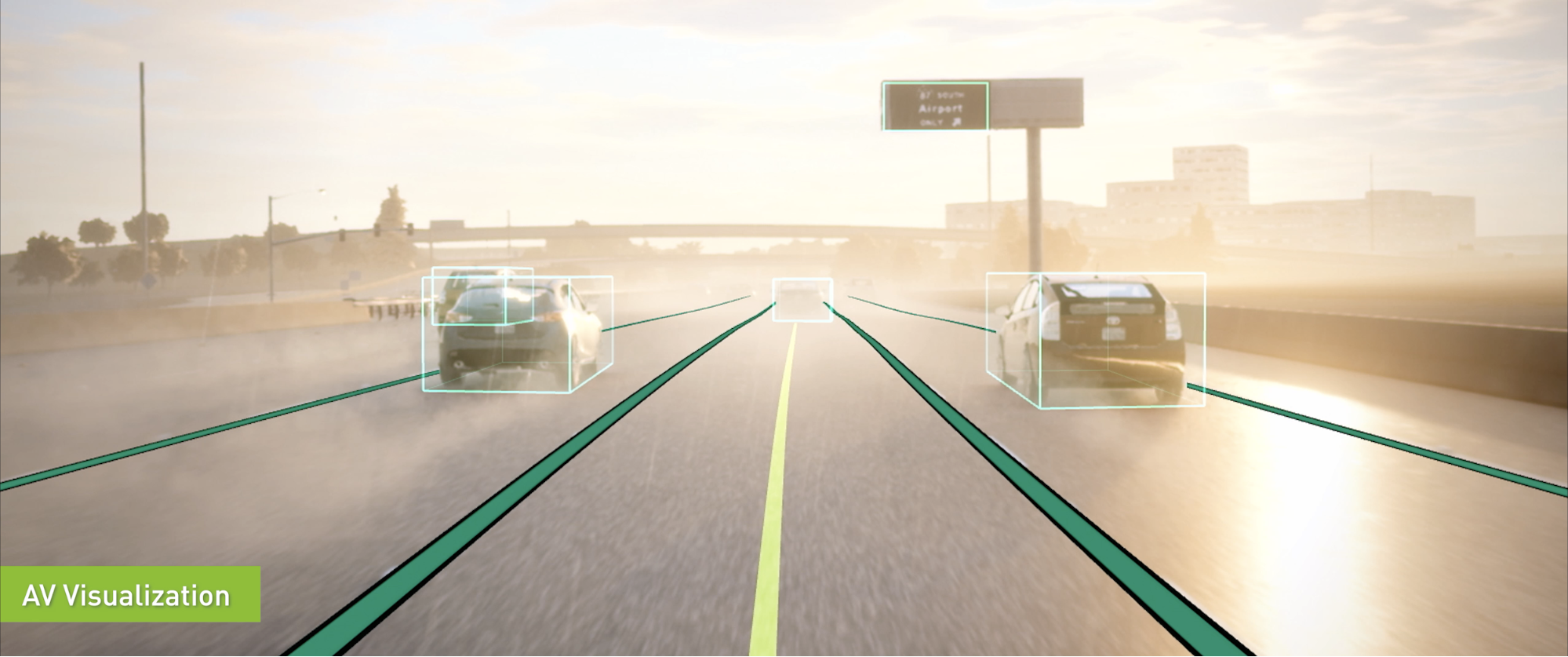
DRIVE Sim は、さまざまな光条件や気象条件で AV ソフトウェアをテスト可能
センサー データを再現する
正確な環境が整ったところで、忠実度の高い開発とテストで次に求められるのは、正確に生成されたセンサー データです。センサー モデルには、典型的な自動運転テスト車両に備えられている、カメラ、ライダー、レーダー、慣性計測装置などが含まれます。DRIVE Sim は柔軟なセンサー パイプラインと API を提供しており、現実の車両の構造に合わせてセンサーを配置できるようになっています。
カメラ データのイメージ パイプラインはまず、車両で使われているカメラのレンズ特性に応じて歪められている HDR イメージをレンダリングするところから始めます。センサーのプロファイルと一致するように、イメージには、露出制御、黒レベルと白レベルの調整、カラー グレーディングが行われます。最後に、センサー固有のエンコーダーを使って、ピクセル データをネイティブの出力フォーマットに変換します。
カメラ モデルに加え、DRIVE Sim はレイトレーシングを使って、物理に則したライダーとレーダーのセンサーも提供しています。NVIDIA RTX GPU によって、DRIVE Sim は非常に計算負荷の高いレーダーとライダーのモデルをリアルタイムで実行できます。
8 つのレーダーの複合リターンを AV スタックにリアルタイムでレンダリングしているシーン。DRIVE Constellation はパワフルな RTX GPU を備えており、レイトレーシングを使ってセンサーをリアルタイムでレンダリングすることが可能。
車両の振る舞いをモデル化する
最後に、正確なシミュレーションにとっては車両モデルがきわめて重要です。車載コンピュータに送信される制御信号 (ステアリング、加速、減速) に基づき、車両モデルは物理世界の場合と同じように反応しなければなりません。
そのために、シミュレーション プラットフォームは、道路の表面との相互作用などの細部を含め、動きを正確に再現する必要があります。DRIVE Sim の車両モデルは、プラグイン システムを使って処理されており、組み込みの PhysX モデル、または NVIDIA DRIVE エコシステム パートナーである Mechanical Simulation や IPG などのサード パーティ製車両力学モデルが利用できます。
車両力学は、正確なセンサー データの生成にも重要な役割を果たしています。車両の動作中、車両の位置や姿勢は著しく変わり、センサーの視点に影響を与えます。たとえば、車が減速しているとき、前方カメラは下に傾きます。センサー データを適切に生成するには、車両力学の正確なモデル化が重要です。
これらの各要素 (環境、センサー、車両力学) を、エンドツーエンドの単一プラットフォームで正確にシミュレートすることによって、NVIDIA DRIVE Constellation と DRIVE Sim は、包括的な開発およびテストのパイプラインにとって欠かせない一部となっています。それにより、NVIDIA とそのパートナーは、物理的なテスト車両がガレージにとどまっている間も、より安全で効率的な自動運転車の開発に取り組むことができます。