GTC Digital のセッションで NVIDIA DRIVE の開発プロセスを詳しく紹介
インテリジェントな車はインテリジェントに開発しなければなりません。
そのため、NVIDIA ではデータ センターから車載コンピューターにいたるまで、AI を活用した包括的なポートフォリオを構築し、ソフトウェア定義による自動運転車の実現を目指してきました。そして今月、GTC Digital の期間に、この開発プロセスの仕組みと、より安全で効率的な移動手段の実現に向け得た取り組みについてご紹介します。
自動運転車が真にドライバーレスとなるためには、世界中の何千もの条件下で動作できるようにならなければなりません。このレベルの能力を達成する鍵となるのが、大量のデータです。
簡単に言うと、たった 50 台の車が 1 日に 6 時間走行しただけでも、センサーは 1 日あたり 1.6 ペタバイトものデータを生み出します。その全データを標準的な 1 GB のフラッシュ ドライブに保存したとすると、フットボール競技場 100 面分以上の面積を覆うことになります。データは次に、選別、ラベル付けされ、物体検知や自己位置推定などのさまざまな専用機能を持つ車載用のディープ ニューラルネットワーク (DNN) のトレーニングに使われます。
このようなソフトウェアをトレーニングしテストするインフラストラクチャには、膨大なデータを扱う必要性から、高性能のスーパーコンピューターが不可欠です。効率的な動作のために、システムはデータをインテリジェントに整理してまとめることができなければなりません。また、プロセスの中でバグを簡単に発見し修正できるように、トレースが可能であること、DNNの成熟を確認するため、同じシナリオを何度も反復可能なことが求められます。
GTC Digital シリーズの一環として、NVIDIA では、この包括的な開発およびトレーニングのインフラストラクチャと、そこから生まれた DNN をいくつかご紹介し、未来の車の実現に向けた進捗について発表します。
生まれも育ちもデータ センター
現代の車は工場の製造ラインで組み立てられますが、自動運転車はデータ センターで生まれます。GTC Digital のセッションで、NVIDIA の AI インフラストラクチャ担当バイス プレジデントであるクレメント ファラベット (Clement Farabet) は、自動運転車開発のための高性能なエンドツーエンド プラットフォームについて説明しています。
 NVIDIA の AI インフラストラクチャ担当バイス プレジデント、クレメント ファラベット
NVIDIA の AI インフラストラクチャ担当バイス プレジデント、クレメント ファラベットNVIDIA 内の AI インフラストラクチャには、何ペタバイトもの走行データを保存し処理する NVIDIA DGX サーバーが含まれます。包括的な訓練をする場合、開発者は DNN を開発し、その後で DNN のパフォーマンスを評価するために、50 億から 100 億のフレームを処理しなければなりません。
高性能なデータ センターの GPU は、そのデータ処理にかかる時間を短縮してくれます。さらに、ファラベットのチームは、能動学習などの高度な学習手法を使って開発時間を最適化しています。
能動学習では、DNN を訓練するための走行データの整理とラベル付けを人間だけに頼るのではなく、学習の対象とすべきデータを DNN に選ばせることができます。まず専用のニューラルネットワークがフレームのプール内を探索し、不確かなものにフラグを付けます。フラグ付きのフレームは、次に手動でラベル付けされて DNN のトレーニングに使われ、これにより確実に新しいデータまたは不確かなデータから学習できるようになります。
 高性能なデータ センターの GPU により、開発者は自動運転 DNN のトレーニング、テスト、検証を大規模に行うことができます。
高性能なデータ センターの GPU により、開発者は自動運転 DNN のトレーニング、テスト、検証を大規模に行うことができます。一度トレーニングされると、これらの DNN は NVIDIA DRIVE Constellation シミュレーション プラットフォーム上でテストと検証ができるようになります。このクラウドベースのソリューションにより、仮想環境の中で、幅広いシナリオに沿って何百万マイルも走行することが可能になります。日常的な走行から、めったにない危険とさえいえる状況まであり、現実世界でできるよりもはるかに効率がよく、低コストで、安全にテストと検証が行えます。
DRIVE Constellation の忠実度の高いシミュレーションを使えば、これらの DNN を公道で運用する前に、起こり得るすべてのシナリオや条件を何度も繰り返しテストできます。
データ センターでのトレーニングとシミュレーションを組み合わせることにより、自動化され、トレース可能で、反復可能な開発プロセスの中でソフトウェアを常に改善できるようになります。
- オンデマンド動画リンク: 自動運転車のための NVIDIA の AI インフラストラクチャ
エッジにおける DNN
一度トレーニングと検証が行われると、これらの DNN は車内で運用できるようになります。
GTC Digital において、NVIDIA の自動運転車担当シニアマネージャーで、DRIVE ラボ ビデオ シリーズのホストであるネダ ツヴィエティク (Neda Cvijetic) は、NVIDIA が開発したいくつかの DNN について内側からご紹介しています。
 NVIDIA の自動運転車担当シニアマネージャー、ネダ ツヴィエティク
NVIDIA の自動運転車担当シニアマネージャー、ネダ ツヴィエティク自動運転車は、安全な運用のために、認識、マッピング、自己位置推定を含む数々の DNN を実行します。このようなタスクは、人間には単純明快に見えるかもしれませんが、どれもうまく遂行するにはインテリジェントなアプローチが必要となる複雑なプロセスです。
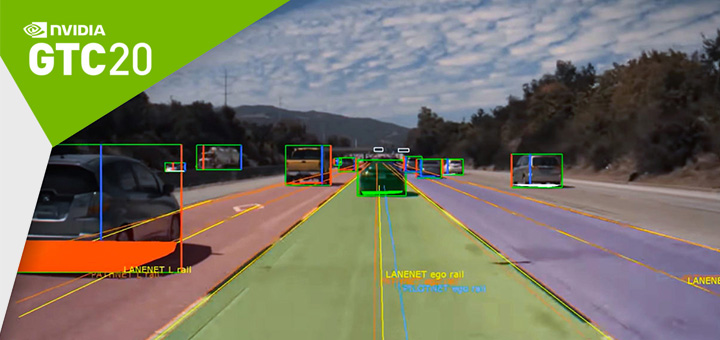
たとえば、路上の物体、歩行者、走行可能なスペースを分類するために、ある DNN はパノプティック セグメンテーションと呼ばれるプロセスを使用します。これは、シーンをピクセルレベルの精度で識別できるものです。
さまざまな環境で駐車スペースを認識できるようにするため、開発者は ParkNet DNN に、駐車場所を長方形ではなく 4 辺から成るポリゴンとして識別するように教え、傾いたスペースやその入り口を見分けられるようにしました。
また、NVIDIA の LidarNet DNN は、複数の視点を融合させることで正確で完全な知覚情報を提供し、自己位置推定のためのライダー データ処理における問題解決しています。
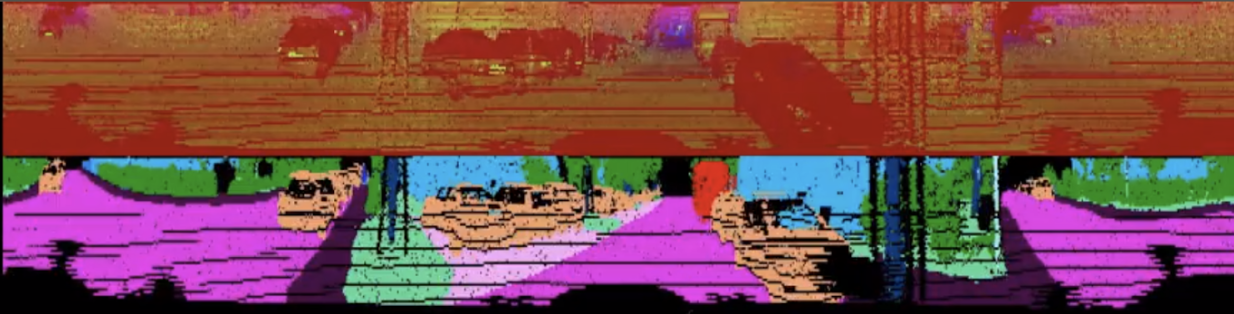 LidarNet DNN は精度の高い自己位置推定のために複数の視点を使用します。
LidarNet DNN は精度の高い自己位置推定のために複数の視点を使用します。このような DNN や他の DNN を組み合わせて、NVIDIA DRIVE AGX プラットフォームのような高性能の車載コンピューター上で実行することにより、自動運転車は包括的な認識と、無人車プランニングと制御ができるようになります。
- オンデマンド動画リンク: NVIDIA DRIVE ラボ: 内側から見た自動運転車ソフトウェア
GTC Digital のサイトでは、この他にも無料のセッションを提供しており、米国時間の 4 月 23 日 まで毎週木曜に NVIDIA のエキスパート と DRIVE エコシステムから新しいコンテンツが追加されます。最新情報と登録はこちらから。