
マッピング専用車両が2024 年までに全世界で 50 万キロメートルを調査することで、地球規模のデジタルツインをセンチメートル単位で構築
世界中の詳細な情報を含むマップは、AI が先進的で安全な走行を実現するための洞察を提供します。
GTC の基調講演において、NVIDIA の創業者/CEO であるジェンスン フアンは、安全を維持しながら最高レベルの自律走行を可能にする、マルチモーダルなマッピング プラットフォーム、NVIDIA DRIVE Map を発表しました。このプラットフォームでは、DeepMap 調査マッピングの正確性に加え、AI を活用したクラウドソース型マッピングによる最新の情報とスケールが組み合わされています。
カメラ、LiDARおよびレーダーという、3 つの自己位置推定のレイヤーを通じて、DRIVE Map は、最先端の AI ドライバーが必要とする、冗長性と多様性をもたらします。
DRIVE Map は、2024 年までに北米、ヨーロッパおよびアジアの道路 50 万キロを対象とした、調査レベルのグラウンドトゥルース マッピングを行います。このマップは、数百万台の乗用車によって、継続的にアップデートおよび拡張されます。
NVIDIA DRIVE Map は、自律走行車両業界のすべての企業が使用できます。
マルチレイヤー
DRIVE Map には、カメラ、LiDARおよびレーダーを通してデータを得るための、複数の自己位置推定レイヤーが備わっています。AI ドライバーは、マップのそれぞれのレイヤーを個別にローカライズすることができ、それによって、最高レベルの自律走行に必要とされている多様性と冗長性を得ることができます。
カメラの自己位置推定レイヤーは、車線の分離、道路標示、道路の境界、交通信号、標識およびポールといった、マップ属性で構成されています。
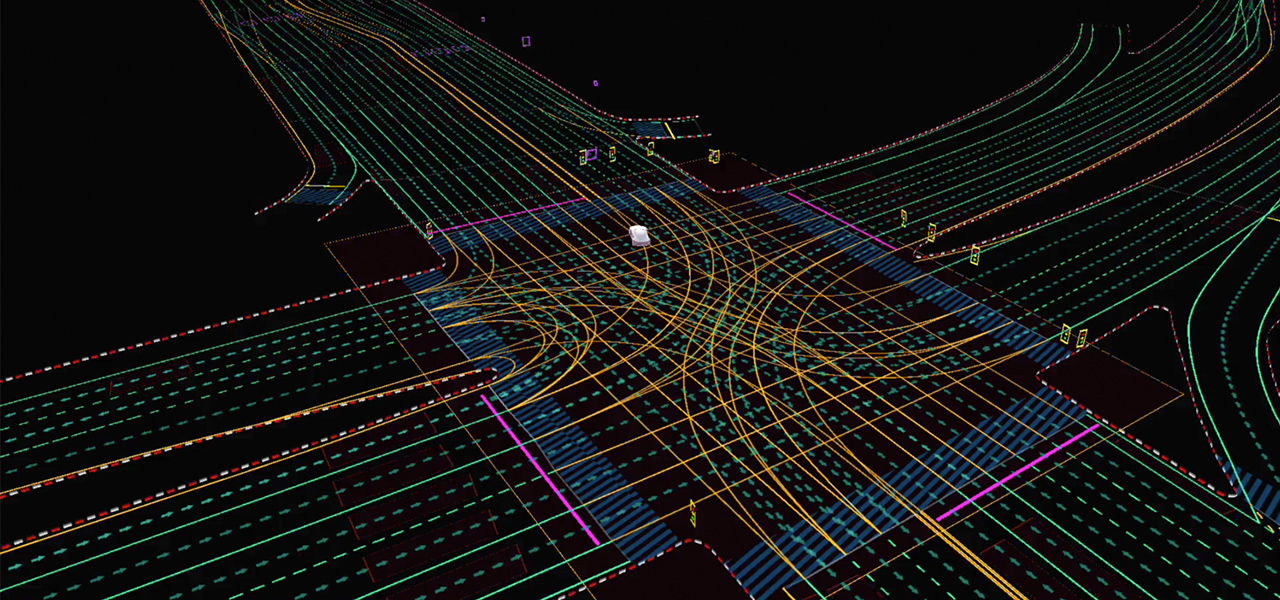 DRIVE Mapのセマンティック自己位置推定レイヤー
DRIVE Mapのセマンティック自己位置推定レイヤーレーダーの自己位置推定レイヤーは、レーダー反射のポイント クラウドの集まりです。このレイヤーは、カメラが十分に機能できないような照明条件や、カメラとLiDARが機能しにくい悪天候のときに、とりわけ役に立ちます。
 DRIVE Mapの、レーダーによる自己位置推定レイヤー
DRIVE Mapの、レーダーによる自己位置推定レイヤーレーダーによる自己位置推定レイヤーは、通常のマップ属性が入手できない郊外エリアで役に立ちます。これによって、AI ドライバーはレーダーを反射させる周辺の物体にもとづいて自己位置推定ができるようになります。
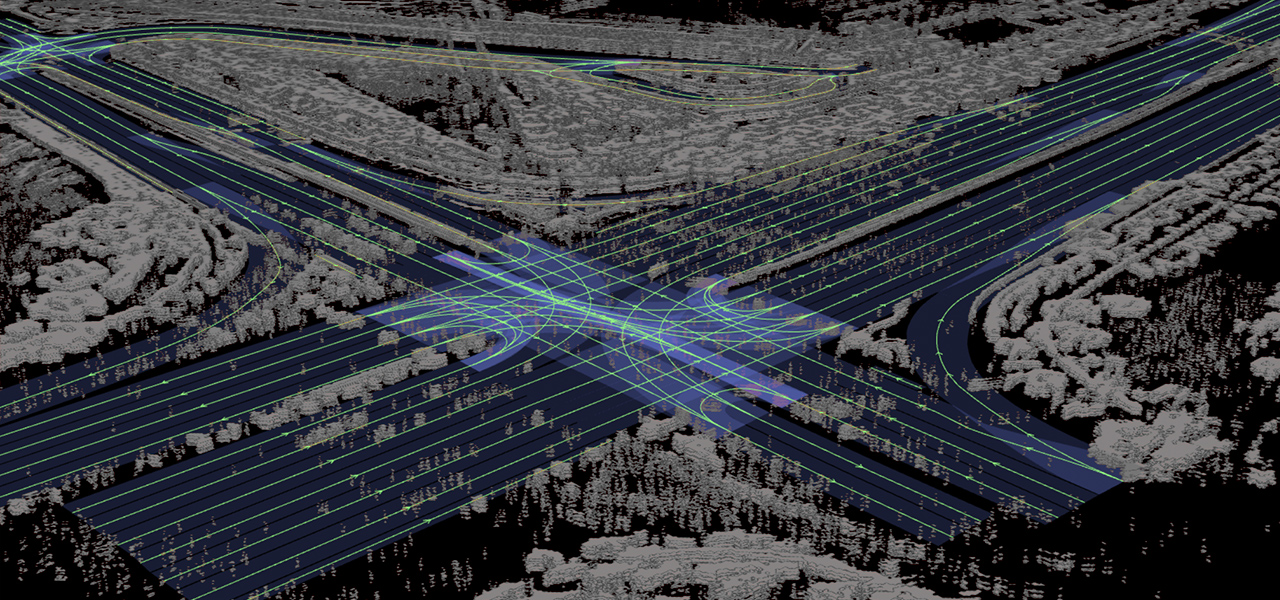
LiDARによるボクセル レイヤーは、環境を最も精密に、最も信頼できる方法で再現します。このレイヤーは、カメラやレーダーでは不可能な精度である、5 センチメートル単位の解像度で、3D の世界を再現します。
 DRIVE Mapの、LiDARボクセルによる自己位置推定レイヤー
DRIVE Mapの、LiDARボクセルによる自己位置推定レイヤーマップにローカライズされると、AI はマップが提供する詳細な意味情報を活用することで、今後の走行を計画し、運転上の意思決定を安全に行えるようになります。
両方の利点を融合
DRIVE Map は、グラウンドトゥルース調査型マップ エンジンとクラウドソース型マップ エンジンという、2 つのマップを実装しており、これらマップ エンジンが世界中の調査車両群からの情報を収集および保存します。
この独自のアプローチでは、専用の調査車両によるセンチメートル単位の正確さと、数百万台の車両が継続的にマップをアップデートすることで入手できる最新の情報とスケールの両方の長所を兼ね備えています。
グラウンドトゥルース エンジンは、過去 6 年にわたって開発および検証がなされてきた、立証済みのテクノロジであるDeepMap 調査マップ エンジンがベースになっています。
AI をベースにしたクラウドソース型エンジンは、数百万台の車両からマップのアップデートを収集し、車両が走行するたびに、新しいデータをクラウドに継続的にアップロードします。その後、このデータはNVIDIA Omniverse に完全な忠実度で集約され、マップのアップデートに使用され、現実世界の車両に数時間以内に最新のマップを OTA でアップデートします。
DRIVE Map には、データ インターフェースの DRIVE MapStream が実装されており、DRIVE Map の要件を満たした乗用車であれば、カメラ、レーダーおよびLiDARのデータを使ったマップを継続的にアップデートできるようになります。
地球規模のデジタルツイン
DRIVE Map は、走行中に最適な意思決定ができるように AI を支援するだけでなく、グラウンドトゥルース トレーニング データを生成することで、ニューラル ネットワークのトレーニング、さらにテストと検証に至る、自律走行車 (AV) 導入のプロセスを加速します。
これらのワークフローは、現実世界のマップ データがロードおよび保存されるOmniverse を中心に行われます。Omniverse は、地球スケールで再現されたデジタルツインを維持し、調査マップ用車両と数百万台の乗用車によって、継続的にアップデートおよび拡張されます。
Omniverse に構築された、自動化されたコンテンツ生成ツールを使うことで、詳細なマップがNVIDIA DRIVE Sim で使用可能な、走行シミュレーション環境に変換されます。道路の標高、道路標示、安全地帯、交通信号、標識および支柱などは、センチメートル単位の正確さで再現されます。
物理ベースのセンサー シミュレーションとドメイン ランダム化により、AV 開発者は、シミュレーション環境を使って、現実世界からのデータでは得ることのできない、トレーニング用のシナリオを生成できるようになります。
AV 開発者は、現実世界で AI を導入する前に、シナリオ生成ツールを適用して、デジタルツイン環境で AI ソフトウェアをテストすることもできます。さらに、デジタルツインは、車両が世界で走行している場所を完全に仮想的な画像で車両操作者に知らせるとともに、必要に応じてリモート操作をできるようにします。
多様性と拡張性に優れたプラットフォームである DRIVE Map は、自律走行機能を継続的に高めるために必要とされる、世界を理解する能力を AI ドライバーに提供します。