 Chrome
Chrome Firefox
Firefox Opera
Opera Safari
Safari IE
IE
各種のディープ ニューラルネットワークが自律車両認識を可能にし、自動車が環境を認識できるよう支援
自律走行車はセンサーを用いて世界を見ます。ですが、そうしたデータのすべてをどのようにして理解するのでしょうか?
鍵となるのは認識です。認識とは、道路標識から歩行者、周囲の交通に至るまで、走行中に道路データを処理し特定する能力を意味する業界用語です。AI の力によってドライバーレス車両は、リアルタイムに環境を識別して対応でき、安全に移動することが可能になります。
これはディープ ニューラルネットワーク、つまり DNN の名で知られている各種のアルゴリズムを用いて達成されます。
DNN は、「赤信号が見えたら止まれ」といった、自動車が従うべき、人手で書かれたルール セットを要求するというより、センサー データを用いて自力で世界を移動する方法を車両が学習できるようにするものです。
こうした数学モデルは人間の脳に着想を得ており、経験から学びます。DNN は、異なる条件下の一時停止標識の画像を多数見せられると、一時停止標識の特定方法をひとりでに学習できます。
自律走行車の安全の 2 つの鍵: 多様性と冗長性
ですが、たった 1 つのアルゴリズムだけでは間に合いません。安全な自律走行には、それぞれが特定のタスクに特化した DNN 一式が必要です。
これらのネットワークは多様であり、標識の読み取りから交差点の特定、走行進路の検知に至るまで、あらゆる機能をカバーしています。また冗長であり、障害の可能性を最小化する能力を重複して有しています。
自律走行に必要な所定数の DNN というものはありません。しかも新しい機能が頻繁に登場するため、リストは絶えず増大し、変化しています。
自動車を実際に運転するには、個々の DNN によって生成される信号をリアルタイムに処理しなければなりません。それには NVIDIA DRIVE AGX などの集中型ハイパフォーマンス コンピューティング プラットフォームが必要です。
以下は NVIDIA が自律走行車認識に使用している主要な DNN の一部です。
進路発見
走行可能な場所を見極めて進路を安全に計画できるよう自動車を支援する DNN には、以下のものがあります。
- OpenRoadNet は、自車の車線であるか隣接する車線であるかにかかわらず、自車の周囲の走行可能な空間をすべて特定します。
- PathNet は、車線区分線がなくても、自車の走行可能な進路を強調表示します。
- LaneNet は、自車の進路を定める車線境界線や他の標示を検知します。
- MapNet も、車線と、高解像度地図の作成と更新に使用可能なランドマークを特定します。
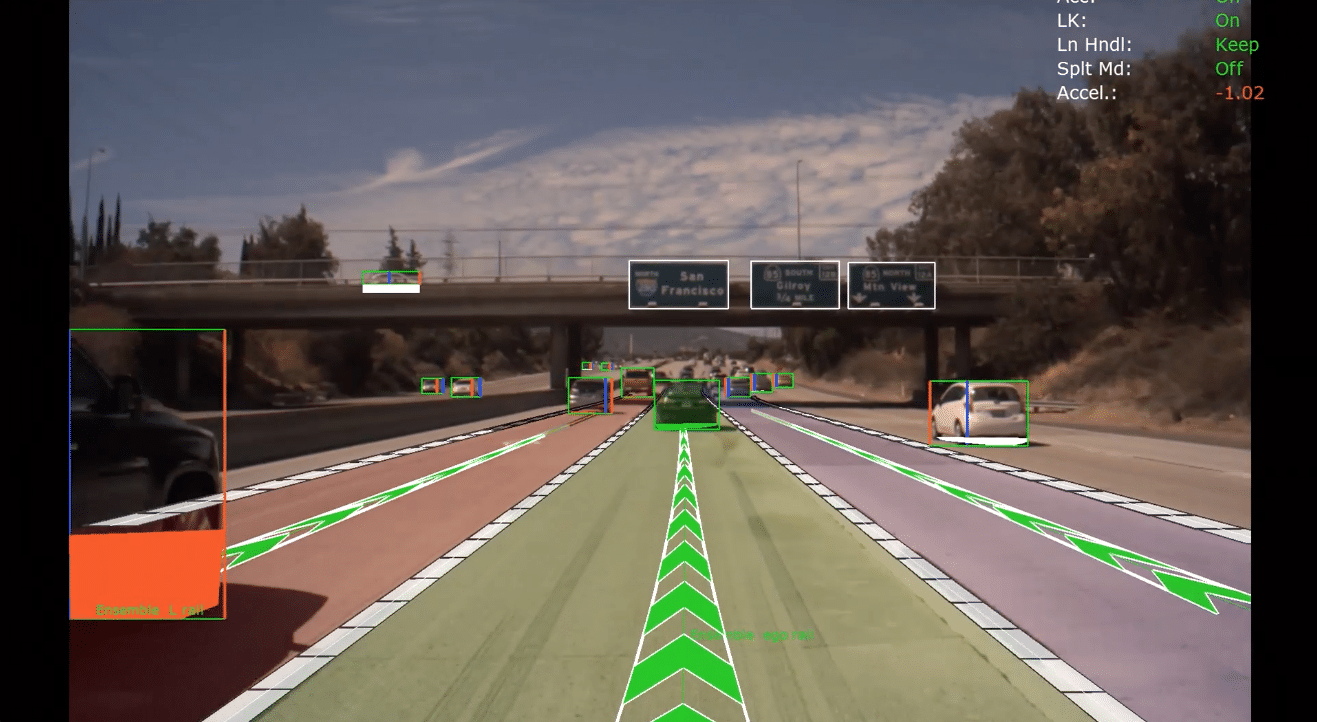 複数の進路発見 DNN が協力して、自律走行車のために安全な走行ルートを特定します。
複数の進路発見 DNN が協力して、自律走行車のために安全な走行ルートを特定します。物体の検知と分類
障害物である可能性のある物体、そして信号機と交通標識を検知する DNN には、以下のものがあります。
- DriveNet は道路上の他車、歩行者、信号機、そして交通標識を認識しますが、信号の色や標識の種類は読み取りません。
- LightNet は信号機の状態、つまり赤か黄色か青かを分類します。
- SignNet は標識の種類、つまり一時停止、前方優先道路、一方通行などを判別します。
- WaitNet は、交差点など、車両が停止して待たなければならない状況を検知します。
まだまだあります
車両や運転席の一部の状態を検知したり、駐車などの操作を支援したりすることが可能な DNN には、以下のものがあります。
- ClearSightNet は、車両のカメラの視界がどの程度良好かをモニターし、雨、霧、そして直射日光などの、見通しを制限する状況を検知します。
- ParkNet は駐車可能な場所を特定します。
これらのネットワークは、冗長で多様な DRIVE ソフトウェア認識レイヤーを構成する DNN のほんの一例に過ぎません。
NVIDIA が自律走行ソフトウェアにどのように取り組んでいるのかをより詳しく知るには、新しい DRIVE ラボ ビデオ シリーズをご覧ください。







