今後 20 年間で、ヒューマノイド ロボットの市場規模は 380 億ドルに達すると予想されています。特に産業および製造部門におけるこの大きな需要に対応するため、NVIDIA はロボット基盤モデル、データ パイプライン、シミュレーション フレームワークのコレクションをリリースし、次世代ヒューマノイド ロボットの開発を加速します。
NVIDIA の創業者/CEO であるジェンスン フアン (Jensen Huang) が本日 CES トレード ショーで発表した、合成モーション生成用の NVIDIA Isaac GR00T Blueprint は、開発者が指数関数的に大きな合成モーション データを作成し、模倣学習を使用してヒューマノイドをトレーニングするのに役立ちます。
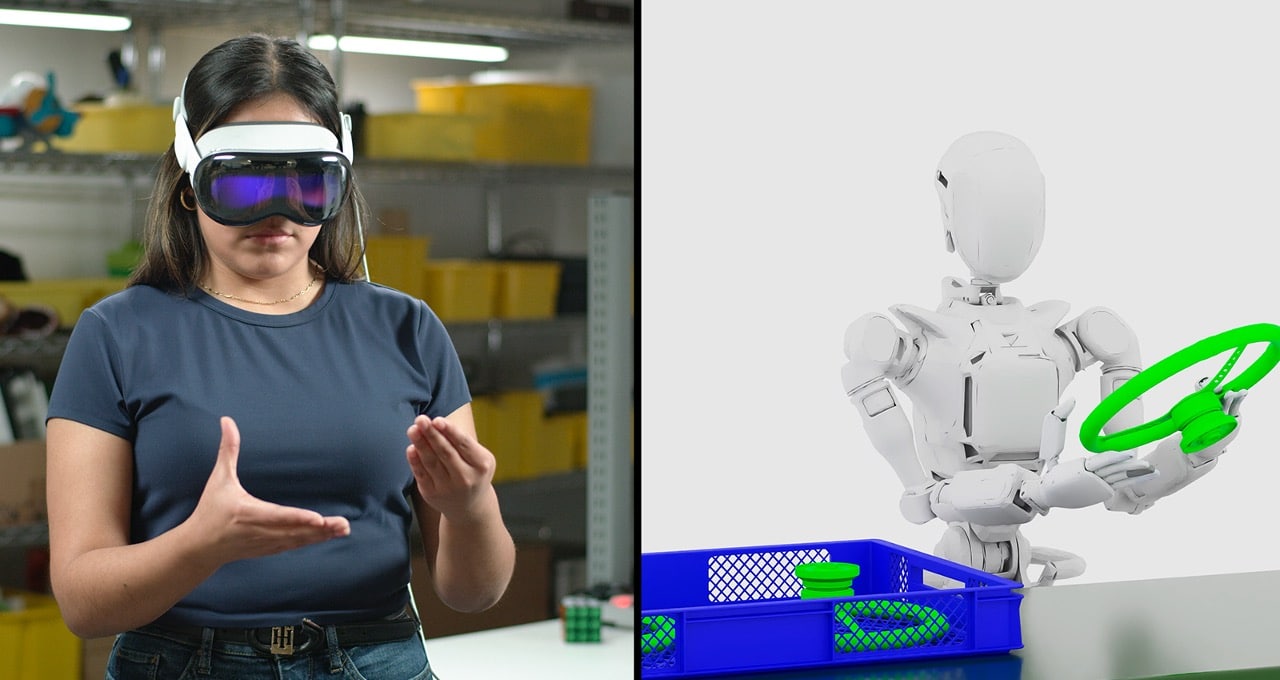
模倣学習 (ロボット学習の一部) により、ヒューマノイドは熟練した人間のデモンストレーションを観察して模倣することで新しいスキルを習得できます。現実世界でこれらの広範で高品質のデータセットを収集するのは手間と時間がかかり、多くの場合、法外な費用がかかります。合成モーション生成用の Isaac GR00T Blueprint を活用すると、開発者は少数の人間のデモンストレーションから指数関数的に大きな合成データセットを簡単に生成できます。
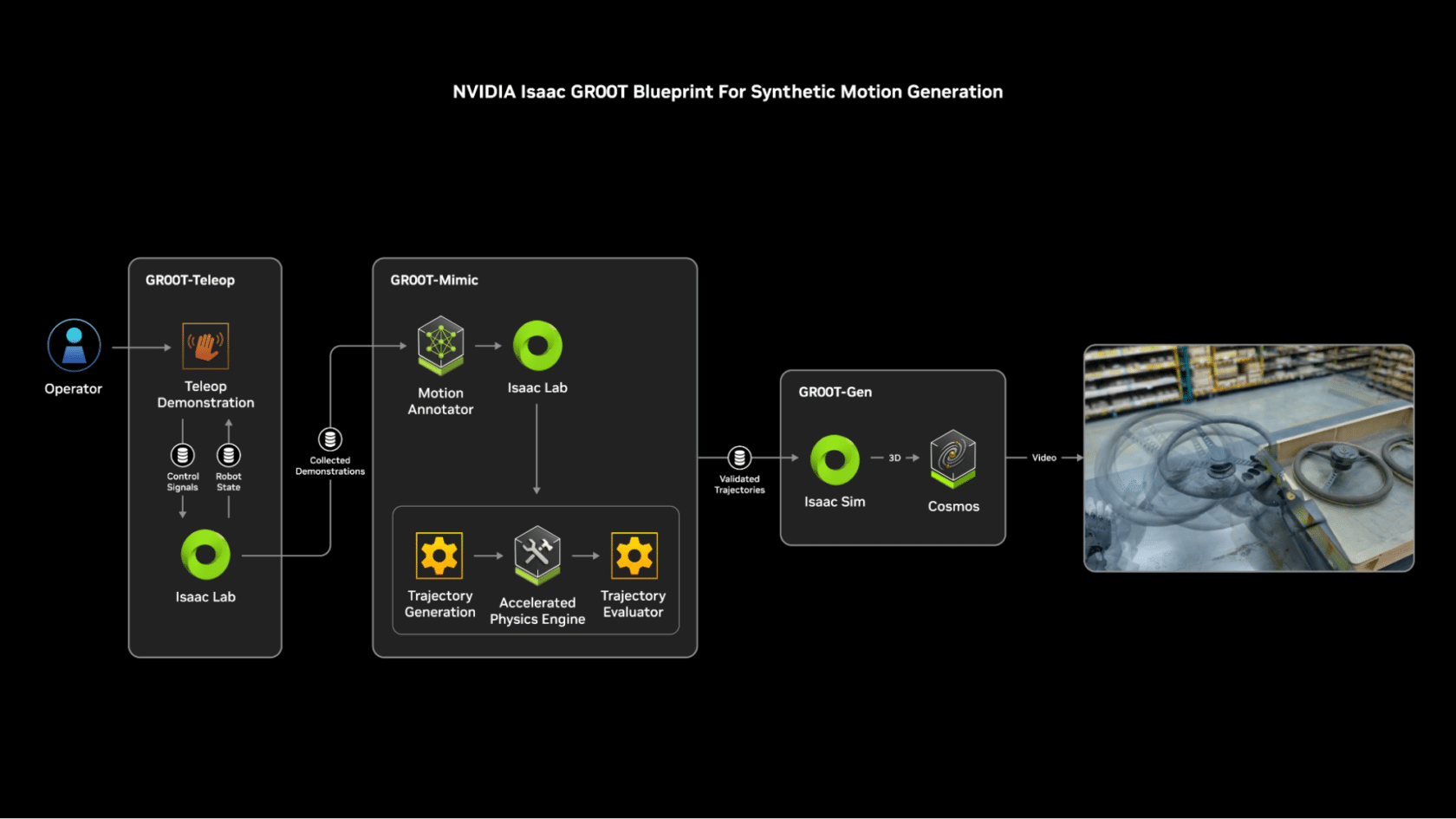
GR00T-Teleop ワークフローから始めて、ユーザーは Apple Vision Pro を利用してデジタル ツインで人間の動作をキャプチャできます。これらの人間の動作は、シミュレーションでロボットによって模倣され、グラウンド トゥルースとして使用するために記録されます。
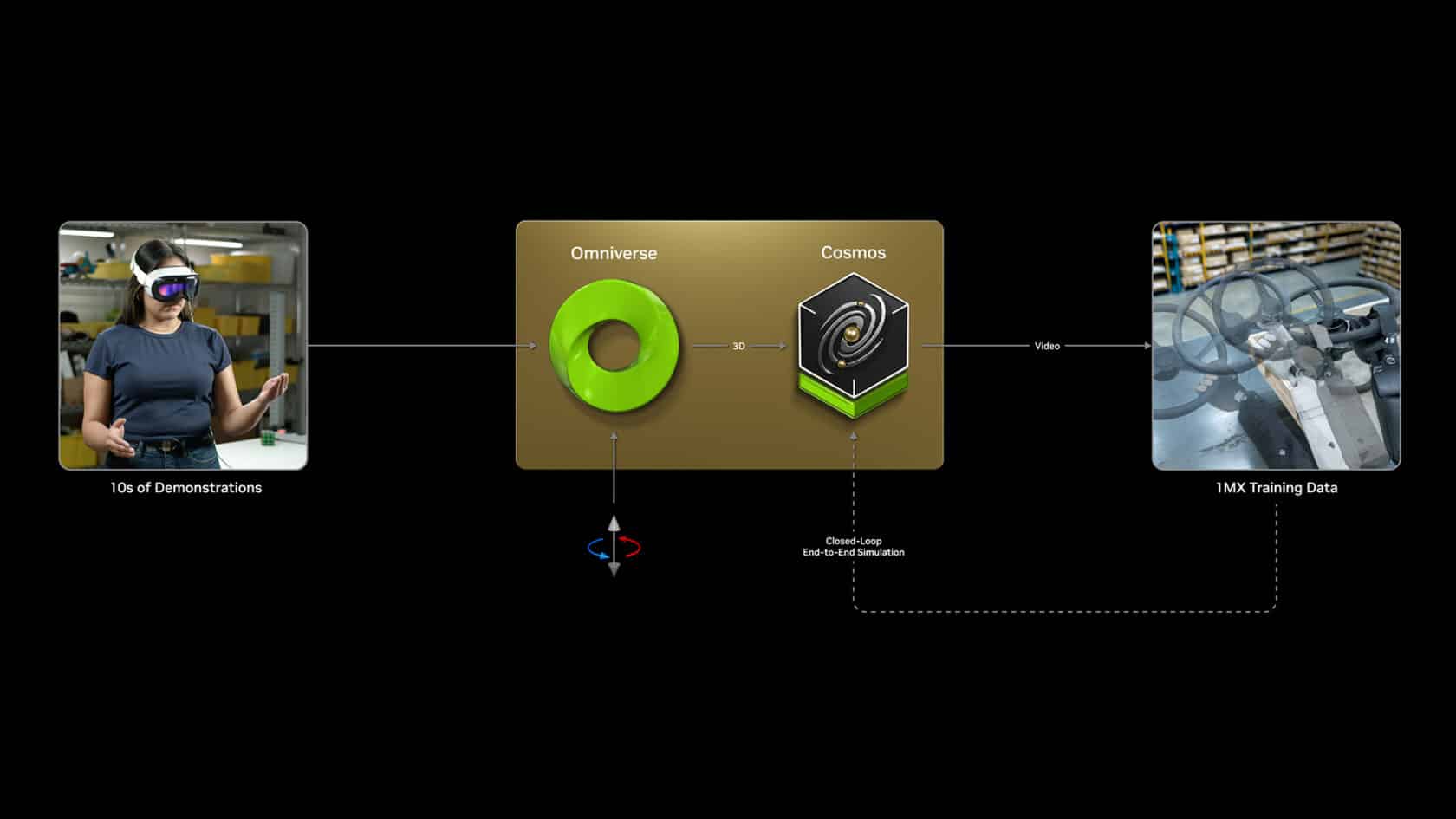
次に、GR00T-Mimic ワークフローは、キャプチャされた人間のデモンストレーションをより大きな合成モーション データセットに増幅します。最後に、NVIDIA Omniverse および NVIDIA Cosmos プラットフォーム上に構築された GR00T-Gen ワークフローは、ドメイン ランダム化と 3D アップスケーリングを通じてこのデータセットを指数関数的に拡張します。
その後、データセットはロボット ポリシーへの入力として使用でき、ロボット学習用のオープンソースのモジュール フレームワークである NVIDIA Isaac Lab で、ロボットに環境内を効果的かつ安全に移動し、対話する方法を教えます。
世界基盤モデルがシミュレーションと現実のギャップを縮小
NVIDIA は CES で Cosmos も発表しました。これはフィジカル AI 開発用の、物理を考慮したビデオと世界状況を生成するために特別に構築された、オープンで事前トレーニング済みの世界基盤モデルのファミリを備えたプラットフォームです。さまざまなサイズと入力データ形式の自己回帰モデルと拡散モデルが含まれています。モデルは、200 万時間の自動運転、ロボティクス、ドローン映像、合成データを含む 1.8 京トークンでトレーニングされました。
Cosmos は、大規模なデータセットの生成に役立つだけでなく、画像を 3D から現実にアップスケールすることで、シミュレーションと現実のギャップを縮小できます。3D アプリケーションとサービスを構築するためのアプリケーション プログラミング インターフェイスとマイクロサービスの開発者プラットフォームである Omniverse と Cosmos を組み合わせることは重要です。これは、高度に制御可能で物理的に正確なシミュレーションを通じて重要なガードレールを提供することで、世界モデルによく伴う潜在的なハルシネーションを最小限に抑えるのに役立つためです。
拡大するエコシステム
NVIDIA Isaac GR00T、Omniverse、Cosmos は、総合的に、物理的な AI とヒューマノイドのイノベーションの大きな飛躍を支援しています。Boston Dynamics や Figure など、大手ロボット企業は Isaac GR00T の採用を開始し、その成果を実証しています。
ヒューマノイド ソフトウェア、ハードウェア、ロボットのメーカーは、NVIDIA のヒューマノイド ロボット開発者プログラムへの早期アクセスを申請できます。
NVIDIA の創業者/CEO であるジェンスン フアン (Jensen Huang) による CES オープニング基調講演をご覧ください。
ソフトウェア製品情報についてのお知らせはこちらをご覧ください。