
DeepMap のテクノロジとの統合により、スケーラブルなHDマッピング、および自己位置推定が可能なプラットフォームを実現
NVIDIA DRIVE Mapping のグローバル化が進んでいます。
NVIDIA の創業者/ CEO のジェンスン フアン (Jensen Huang) は GTC の基調講演で、NVIDIA DRIVE と DeepMap テクノロジを組み合わせた最新のマッピング機能を紹介しました。これにより、クラウドソースされたマップで自律走行車 (AV) 向けの堅牢な
マッピングおよび自己位置推定を可能にする、高精度なソリューションが実現します。
マッピングは自動運転の基本的な柱であり、AV の集合的な記憶として機能します。HD マップは運転環境の基礎的理解を提供し、車の走行中に継続的に更新されます。NVIDIA は最近、大手マッピング会社の DeepMap を買収しました。NVIDIA と DeepMap によるチームが協働して、高性能なマッピング ソリューションを世界中で加速、向上、拡張しています。
これらのマップは、正確であり誤差は数センチ メートル以内で、道路工事や車線規制といった最新の道路状況を反映しなければなりません。高速処理と最小限のデータ ストレージで、さまざまなAV 車両に導入可能な効率的なスケーラビリティを実現する必要があります。また、世界中で機能する必要もあります。
NVIDIA DRIVE Mapping では、専用AV 車両や個々の車両のどちらでもリアルタイムでマップを作成および更新できるようになり、世界中の自動運転に適用できるスケーラブルなソリューションが構築されます。
途切れないサイクル
DRIVE Mapping は、安全かつスケーラブルで、常に最新の情報をを提供できるよう構築されています。
このシステムは、自律走行車の量産に対応したコンピュータ、センサー、ソフトウェアを含む NVIDIA DRIVE Hyperion 8 を搭載した車両で認識された結果を活用しています。また、様々な条件下で、車両のドアからドアまでの走行における自律性をサポートします。
DRIVE Mapping には、カメラとレーダーを活用した自己位置推定レイヤーが搭載されており、AI 支援による運転機能のためにそれぞれの地域がマッピングされています。レーダーにより、カメラでは認識できなくなる可能性のある悪天候や日照条件での自己位置推定と運転を可能にするための冗長レイヤーが提供されます。信頼性と精度を向上させるため、マッピング用のニューラル ネットワークはグラウンドトゥルース マップを使用してトレーニングされています。
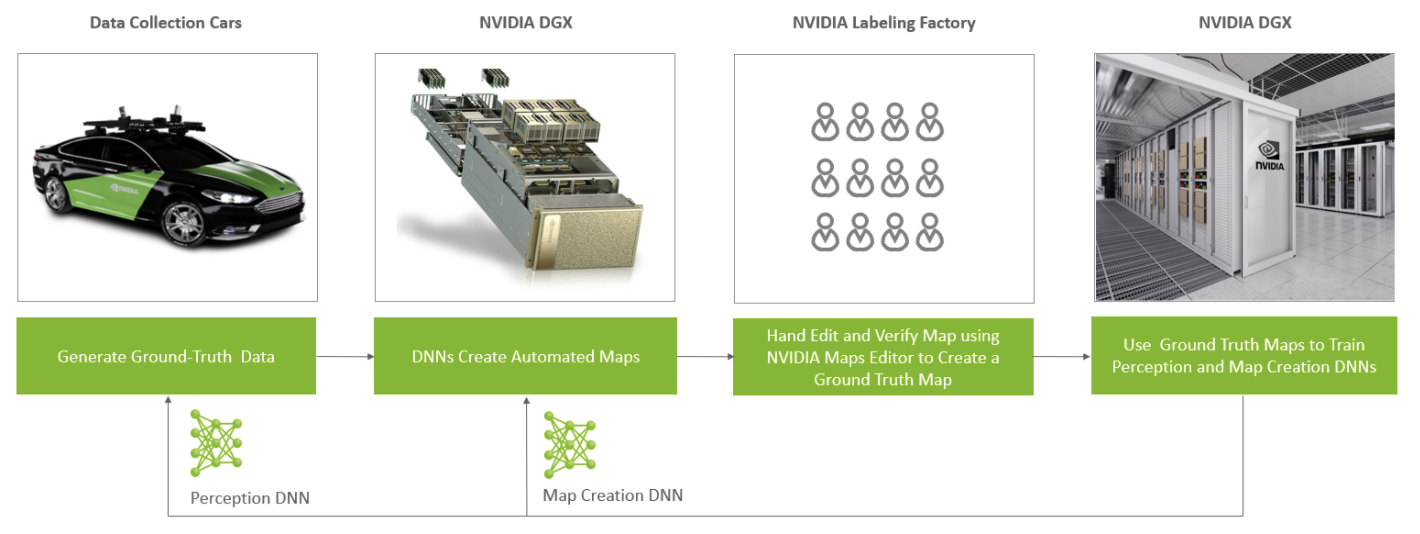 グラウンドトゥルース マップを使用した DRIVE Mapping DNN 作成プロセス
グラウンドトゥルース マップを使用した DRIVE Mapping DNN 作成プロセスDRIVE Hyperion のセンサー データは、車内の NVIDIA DRIVE AGX AI コンピューティング プラットフォームに供給されます。マッピング ネットワークはこのデータを使用して認識を行い、交差点の詳細、信号機、駐車場、道路と車線の境界などを特定し、運転可能な安全な経路を決定します。このネットワークは、さまざまな環境、日照条件、天候、地域で利用できます。
クラウドソーシングによるプラットフォームである DRIVE Mapping がカバーする範囲は、NVIDIA DRIVE Hyperion を利用する自動車メーカーの数とともに拡大しています。これらの自動車メーカーは2024 年以降、世界中に AV 車両を流通させるべく取り組んでおり、今後も成長を続けることでしょう。
DRIVE Mapping は NVIDIA DGX SuperPOD インフラストラクチャを活用して、これらのマップのメンテナンスをグローバル規模で行います。ここで使用される AI システムは、DRIVE Hyperion 搭載の車両からテラ バイト級の認識データを取り込んで、マップを作成および更新します。
道路を走行する DRIVE Hyperion 搭載車両の幅広い基盤に堅牢な認識技術が加わることにより、車両は道路の変化を検出し、マップを常に最新の状態に維持することができます。
DeepMap との開発
NVIDIA が今年初めに買収した DeepMap が長年にわたり蓄積してきたマッピングの専門知識を活用することにより、DRIVE Mapping は世界中に拡張でき、より安全で効率的な自律型交通がさらに多くの道路で実現します。
DeepMapの豊富な知見を活用し、NVIDIA は世界で最も人口の多い地域の測量図を作成するための一連の専用車両を開発中です。これらの車両により作成されたマップが、次世代の AV によるリアルタイムのマップ作成を促進させることになるでしょう。
DRIVE Mapping によって、自律走行車は 3D の世界を認識するだけでなく、 3D の世界を構築することになり、継続的な開発と向上に役立てられるでしょう。
GTCの基調講演のリプレイは、こちらからご視聴いただけます。