自動運転の課題と革新を紹介するビデオ シリーズ
NVIDIA DRIVE ラボ ビデオ シリーズでは、自動運転ソフトウェアがどのように開発されているかについて紹介しています。1 年で 20 のエピソードを紹介してきましたが、説明したい話題は尽きません。
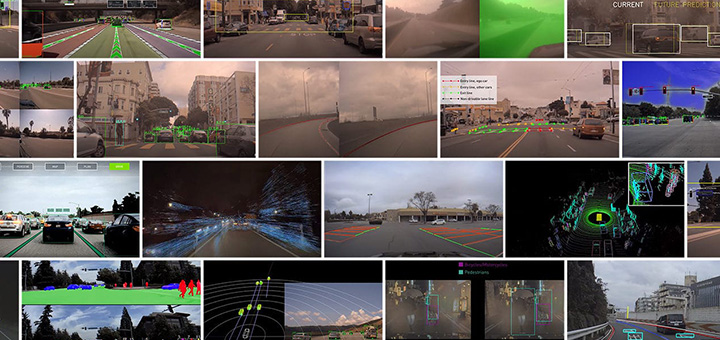
このシリーズでは、360 度の認識からパノプティック セグメンテーション、さらには未来の予測に至るまでさまざまなトピックを取り上げました。自動運転車は現代のコンピューティングにおける大きな課題の 1 つであり、NVIDIA ではソフトウェア開発を、構築要素を一度に 1 つずつ積み重ねるように進めています。
DRIVE ラボは、情報提供と教育を目的としています。この革新的なテクノロジーについて初めて学ぶという方でも、10 年以上取り組んでいる方も、このシリーズをご覧になれば、NVIDIA が開発の際に最も重要な課題であると考えていることや、より安全で効率的な交通を実現するためにどのような取り組みをしているかがお分かりいただけます。
ここでは、この 1 年で取り上げた内容と、今後の計画について簡単に説明します。
知覚ネットワークの断面図
車両が経路を計画し車両操作の決定を行う前に、車両の周囲全体を見て、状況を理解できなければなりません。
DRIVE ラボでは、車両の知覚に関与するディープ ニューラルネットワーク (DNN) について、さまざまなトピックを詳しく説明しています。私たちのアプローチは、冗長化した多様な DNN を使用しています。私たちのDNNモデルでカバーする機能は、交差点検出、信号機や交通標識の検出、交差点の構造の理解など、多岐にわたります。また、駐車スペースを見つける、センサーが遮られていないかどうかを検出するといった、複数のタスクにも対応可能です。
これらの DNN は、歩行者や信号機を中心としたバウンディング ボックスを描き出すだけではありません。DNN により、ピクセル単位まで画像を分解して精度を向上させることや、それらのピクセルの時間経過を追跡して正確な位置情報を得ることが可能になります。
夜間の運転では、AutoHighBeamNet によって車両のヘッドライト制御が自動化されます。また、私たちのアクティブ ラーニングへの取り組みにより、暗闇での歩行者検出の精度が向上しています。
DNN によって、二次元のカメラ画像から三次元での距離を抽出して正確なモーション プランニングを行うといったことも、可能になります。
また、NVIDIA の知覚機能は車両周囲のあらゆる場所で動作します。サラウンド カメラによる物体追跡やサラウンド カメラとレーダーの融合により、知覚の盲点をゼロにします。
先の道路を予測する
自動運転車は環境を認識するだけでなく、他の道路利用者の動きを理解して安全な経路を計画できなければなりません。
DRIVE ラボではリカレント ニューラルネットワーク (RNN) を用いて、自動運転車が物体の動きに関する過去の洞察を使用して未来の動き予測を計算する方法を説明してきました。
衝突を回避する Safety Force Field ソフトウェアにより、プランニングや制御を行うソフトウェアに多様性と冗長性が加わりました。このソフトウェアはバックグラウンドで常時稼働して、プライマリ システムからの制御をダブルチェックし、安全でないと判断されるアクションを拒否します。
DNN やソフトウェア コンポーネントは、自動運転車に導入される開発の一例にすぎません。この重大な課題には厳密なトレーニングとテストが、データ センターと車両の両方で必要となってきます。また、交通状況の変化に、車両ソフトウェアは適応できなければなりません。
今後発信予定の DRIVE ラボのエピソードでは、こうしたトピックについて詳しく説明する予定です。自動運転車のソフトウェア開発を進めていく中で、これらの洞察を共有していきます。