
高性能のAIコンピューティングと高度なアルゴリズムが駐車における課題を過去のものに
縦列駐車、並列駐車、そして角度がある駐車枠への駐車のいずれも、運転の最後に待ち受ける面倒な作業となりえます。
Omniverse Avatar上で構築されたNVIDIA DRIVE Conciergeは、そんな駐車体験を再定義し、あらゆるスペースへの駐車を簡単に処理してくれます。高度でインテリジェントなサモン(呼び出し)機能を備えたこのプラットフォームは、シームレスな降車(ドロップオフ)と乗車(ピックアップ)の送迎体験を提供し、駐車におけるさまざまな可能性を提示します。
Omniverse Avatar のテクノロジにより、DRIVE Concierge はすべての人のデジタル アシスタントの役割を果たすことが可能になります。おすすめを提案したり、レストランへの予約を入れたり、通話を支援したりするほか、通知も行います。運転者と同乗者一人ひとりにパーソナライズされるため、車の搭乗者全員が自分のパーソナル コンシェルジュを持つことができます。
駐車は非常に複雑な作業です。そのスペースへの駐車自体が合法か否か、あるいはアクセス可能なスペース、荷積みゾーンか、または消火栓が近くにあるか、路面清掃のための時間制限があるかどうかなどを判断するために必要な標識や路面標示を探すだけでも大変な作業を要します。
それに加えて、線や縁石で区切られたスペースの境界、コンクリート ブロックやショッピング カートなど駐車場の一般的な障害物もあります。
DRIVE Conciergeは、さまざまなセンサー、高性能AIコンピューティング、柔軟なモジュラー ソフトウェアを使用して、これらすべての条件やそれ以上のことを処理し、ドライバーの送迎、そしてその間待機する駐車場の検索を行います。
インテリジェントなアーキテクチャ
信頼性の高い駐車機能の提供は、安全な運用のための多様性と冗長性のために設計されたハードウェアの構築から始まります。
DRIVE ConciergeはNVIDIA DRIVE Hyperion 8上に構築されており、これには高性能の集中型NVIDIA DRIVE Orinシステム オン チップと完全なセンサー アーキテクチャが含まれています。
Orin SoCは、毎秒254兆回の演算処理を実現し、ISO 26262 ASIL-Dなどの体系的な安全性基準を達成しながら、自動運転車で同時に実行される多数のアプリケーションとディープ ニューラルネットワークを処理するように設計されています。
DRIVE Hyperion 8 センサー スイートは、忠実度の高いサラウンド カメラ、レーダー、超音波センサー、フロント LiDARで構成され、360度の全方位認識を行います。この多様なセンサー セットは、特に複雑な都市部のシナリオにおいて安全かつ堅牢な駐車機能で必要とされる冗長性を提供します。
冗長性があり、多様なDNNの仕組み
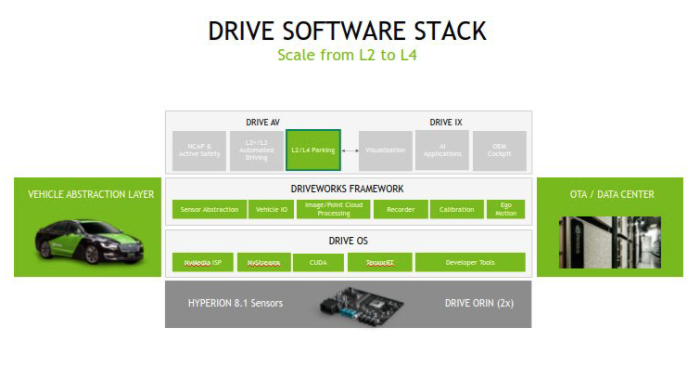
DRIVE Conciergeソフトウェアは、DRIVE OrinとNVIDIA DRIVE SDK上で実行されます。NVIDIA DRIVE SDKは、コンピューティング グラフ フレームワークを実行するDriveWorksミドルウェアとセーフ オペレーティング システムのDRIVE OSで構成されています。これにより、さまざまなディープ ニューラルネットワークが同時に実行でき、ランタイム レイテンシを改善します。
これまで自動駐車機能は超音波センサーの高レベルの機能を使用した車両周辺の環境のスパース(疎)な表現を用いて開発されてきました。ただしこの方法では、歩行者などの動的な要素や車両の周囲の障害物がある環境では使用が困難でした。
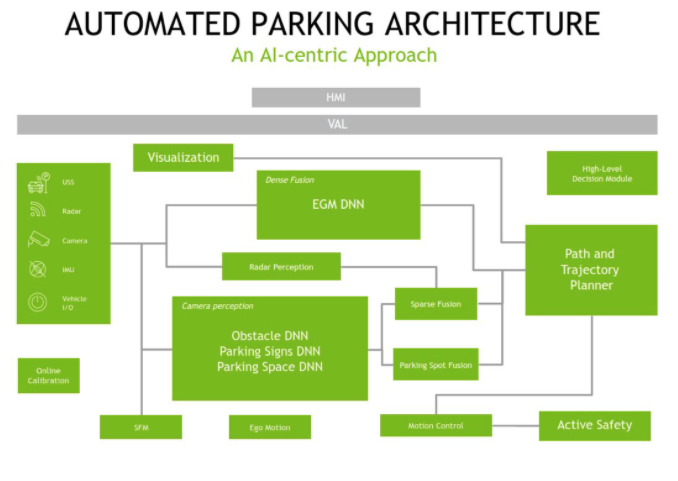
DRIVE Conciergeは、超音波センサーと魚眼カメラからのデータをフュージョン(融合)します。Evidence Grid Map DNNがセンサーからのデータを使用し、車両のすぐ近くにリアルタイムのデンス(密)なグリッドマップを生成します。
この密なデータ フュージョンから生成される情報は、車両の周囲のスペースが空いているかどうか、スペースが動的障害物または静止障害物によって占有されているかなどに関するものです。次にParkNet DNNが複数のカメラからの画像をフュージョンし、選択可能な駐車スペースのリストを提供します。最後に、駐車スポットの認識機能が、複数のカメラからのデータをフュージョンし、駐車スペースと駐車標識を関連付け、使用する駐車スペースを決定します。
密な認識に加えて、駐車機能には、カメラとレーダーの両方のデータを使用して遠距離の物体を知覚するスパースな認識が含まれています。
密認識モジュールとスパース認識モジュールは、冗長化されたセンサー データを使用して相互に補完を行い、それ以降の処理や軌道プランナーモジュールのための正確な4Dワールド モデルを構築します。
最後に、車両の進路/軌道プランナー モジュールは、このデータを使用して、すぐ近くにある物体や高速で移動する遠距離障害物との衝突を回避し、駐車のための車両の操作を計画します。
これらを総合しながら、DRIVE Conciergeは、DRIVE Hyperion 8プラットフォームの包括的なセンサースイートと安全性が認証 されたコンピューティング アーキテクチャを活用し、堅牢でストレスフリーな駐車体験を提供します。
GTCの基調講演のリプレイはこちらからご覧いただけます。