Chrome
Chrome Firefox
Firefox Opera
Opera Safari
Safari IE
IE
編集者注: これは NVIDIA DRIVE ラボ シリーズの最新ブログです。このシリーズでは、自動運転にまつわるさまざまな課題や、NVIDIA DRIVE AV ソフトウェア チームがそれにどのように対処しているかについて、エンジニアの観点から迫ります。
制限速度の標識を理解することは単純なタスクのように思えるかもしれませんが、異なる車線に異なる制限が適用される状況 (高速道路の出口など) や初めて運転する国の場合、たちまち複雑になってしまいます。
今回の DRIVE ラボのエピソードでは、AI ベースのライブ認識によって自動運転車が複雑な制限速度標識をより正しく理解できるようになる方法を、直接的および間接的な手がかりを用いてご説明します。
制限速度標識は導入された当初と比べ、その持つ意味合いがはるかに複雑になっています。たとえばスクール ゾーンを運転する場合、1 日の特定の時間にのみ標識に表示された制限速度を守ればいいのです。
また、制限速度が電光掲示標識に表示されているものもあります。電光掲示標識を採用している場合、その制限が一部の車線に適用され他の車線には適用されない、または特定の条件下で適用され他の条件下では適用されない、または条件によって適用方法が異なるということが考えられます。
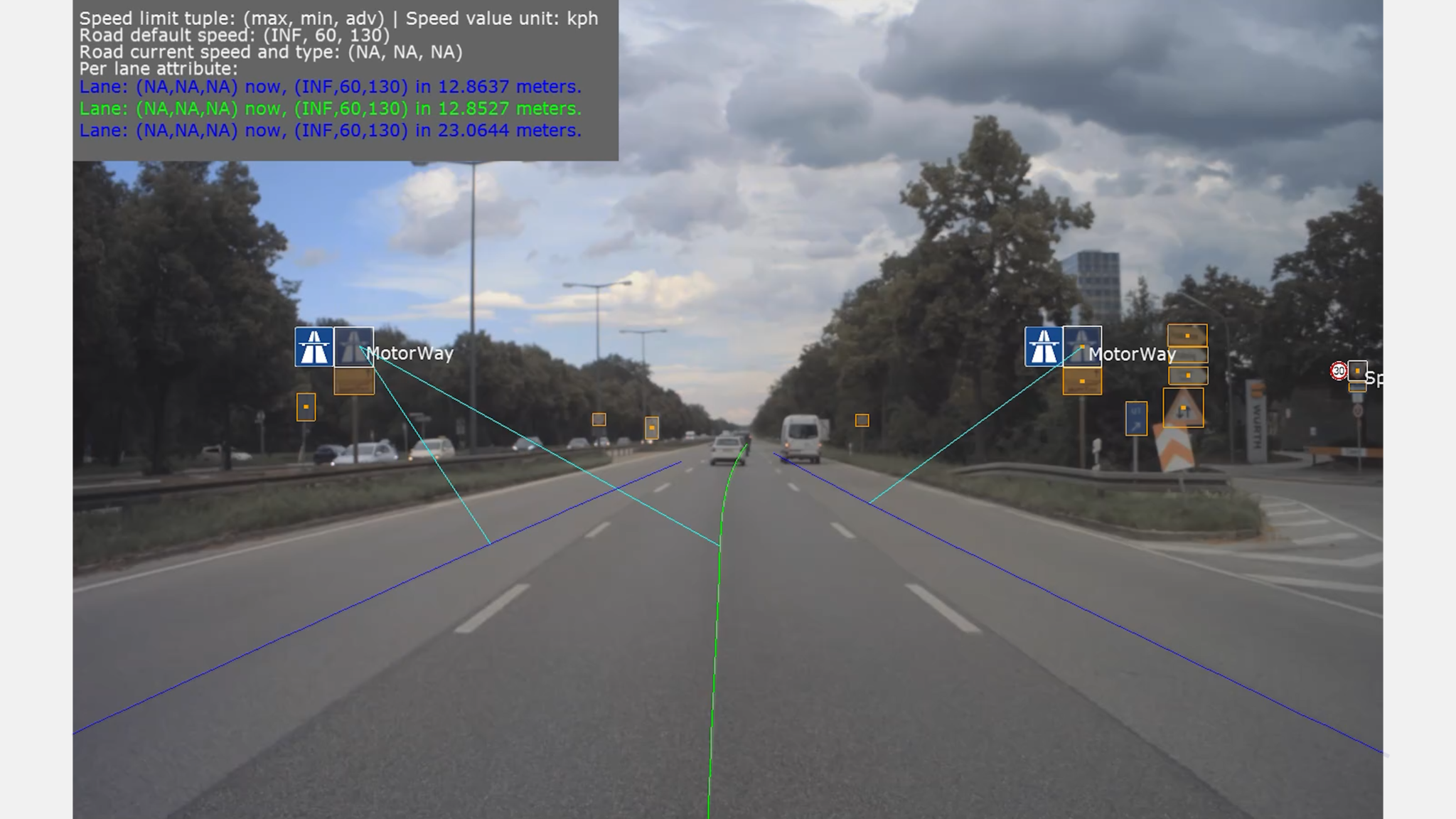 AI ベースのライブ認識が「高速道路の入口」の標識を分析します。
AI ベースのライブ認識が「高速道路の入口」の標識を分析します。また、ドイツの「高速道路の入口」の標識など、速度制限を間接的に伝える標識もあります。つまり、ドライバーは制限速度の数字を直接的に理解できるということではなく、根底にある現地の規則や規制に基づいて制限速度を解釈する必要があります。
さらに、意味論的意味の点でも多くのバリエーションがあります。たとえば見た目にはほぼ同じまたは同一の制限速度標識や、補足テキストが付いている標識です。こうした標識が存在する場合、意味論的意味を修正してしまうか、さらには変更すらしてしまう可能性があります。
従来のスピード アシスト システムにおける課題
こうした複雑さがあるにもかかわらず、自動運転車のスピード アシスト システム (SAS) は多種多様な運転環境で標識を正確に検出して解釈できなければなりません。先進運転支援システムでは、人間のドライバーに正しく知らせたり、さらには修正したりする上で SAS 機能が重要になります。
自動運転アプリケーションでは、SAS 機能は走行経路を計画するソフトウェアや制御ソフトウェアへの不可欠な入力となり、車両が合法で安全な速度で走行できるようにしています。
従来の SAS は、近くの標識やその意味論的意味に関する詳細情報が搭載されたナビゲーション マップや高解像度マップに大きく依存しています。
ただし、マップの精度には限界があることや、そのマップのローカリゼーションに対しても精度に限界があることから、従来のアプローチでは標識を通過後に標識の意味が検出される可能性があります。つまり、標識が登録されるまでは、車両は不適切な速度で走行する恐れがあるのです。
また、地図が最新の情報に基づいていなかったり、別の標識が適用されるべき車線に正しく関連付けられていなかったりする可能性があります。
SAS が稼働開始
従来のアプローチとは対照的に、NVIDIA DRIVE SAS は、間接的または直接的、および時と場合によって意味が変わる可能性のあるメッセージを持つ標識を検出、解釈する広範なディープ ニューラルネットワーク (DNN) を介して AI ベースのライブ認識を活用しています。
具体的には、NVIDIA の WaitNet DNN が標識を検出し、 SignNet DNN が標識の種類を分類し、 PathNet DNN が経路上の認識情報を提供します。
その結果、制限速度標識を理解し道路上にある複数の走行車線との関連性を確立する、いわゆる「標識と経路の関連付け」に必要な合図はすべて、地図から得られる事前情報を必要とせずに、ライブ認識から取得できます。
このアプローチのもう 1 つの利点は柔軟性です。たとえば、特定の地域または国で間接的な制限速度標識に変更があった場合、NVIDIA の SAS は、基になっている「標識と経路の関連付け」ロジックを変更するだけですぐに対応できます。
事前にアノテーションが付けられたマップに依存するシステムの場合、正しくアップデートを行うには、マップ内のすべての場所で新しい規則のアノテーションを付け直さなくてはなりません。
堅牢性をさらに高めるために、速度標識の情報と、ライブ認識 SAS が提供する「標識と経路の関連付け」情報の両方を、地図による情報と融合させることができます。多様な情報をインプットして組み込むことにより、SAS の対象範囲を実際のさまざまなシナリオに合わせて拡張することができます。