
仮想環境でのテストと検証に必要な、複雑で多様なデータセットを自律走行車向けシミュレーション プラットフォーム上で統合
自律走行とは、単に人間のドライバーの代わりとなるだけでなく、人間よりもはるかに安全な AI ドライバーを実現することです。
ランド研究所によると、人間より運転を 20% 向上させるだけでも 110 億マイル分の検証が必要です。これを現実世界に換算すると、100 台の車両を使って 500 年以上休まずに走り続けた距離に相当しますが、それはもちろん不可能な作業です。
シミュレーションは、これまで解消できずに障害となっていた問題への抜本的な解決策となります。開発者は、仮想環境を利用することで、自律走行用のハードウェアやソフトウェアのテストと検証を安全かつ正確に行えるようになります。
GTC Japan に登壇した NVIDIA の創業者/CEO のジェンスン フアン (Jensen Huang) は、次のように述べています。「シミュレーションの統合プロセスを継続することで、当社のエンジニアはすばらしい生産性を発揮できるようになります。AI システムのシミュレーションは成功に不可欠な工程です。」
しかし、シミュレーションが安全な自動運転の開発において効果的なツールとなるには、変化に富む、予測不可能な現実世界の特性を正確に反映する必要があります。
そこで NVIDIA はこのたび、パートナー様と連携してその環境モデル、車両モデル、交通シナリオを統合するための、DRIVE Cnstellation シミュレーション プラットフォームを公開します。
幅広いパートナー様に参加いただくことで、DRIVE Constellation の包括性がさらに増し、複雑で多様なテスト環境に対応できるようになるものと期待しています。
効果的にシミュレーションを行うための重要な要素
シミュレートされたテスト環境とは、ただ仮想道路上に仮想車両があるというだけのものではありません。そこで使用されるモデルは、映画と同じレベルにまで徹底して作り込まれており、その緻密性と正確性は、最終的に車両が走行する市道や幹線道路の設計図面に匹敵する程です。
また、その環境が本物そっくりに見える必要があるだけでなく、物理法則に基づいている必要もあります。DRIVE Sim は、環境、車両、交通シナリオの各モデルを取り込むための機能を備えており、考え得るあらゆる環境と運転状況を仮想環境でテストできるように設計されています。
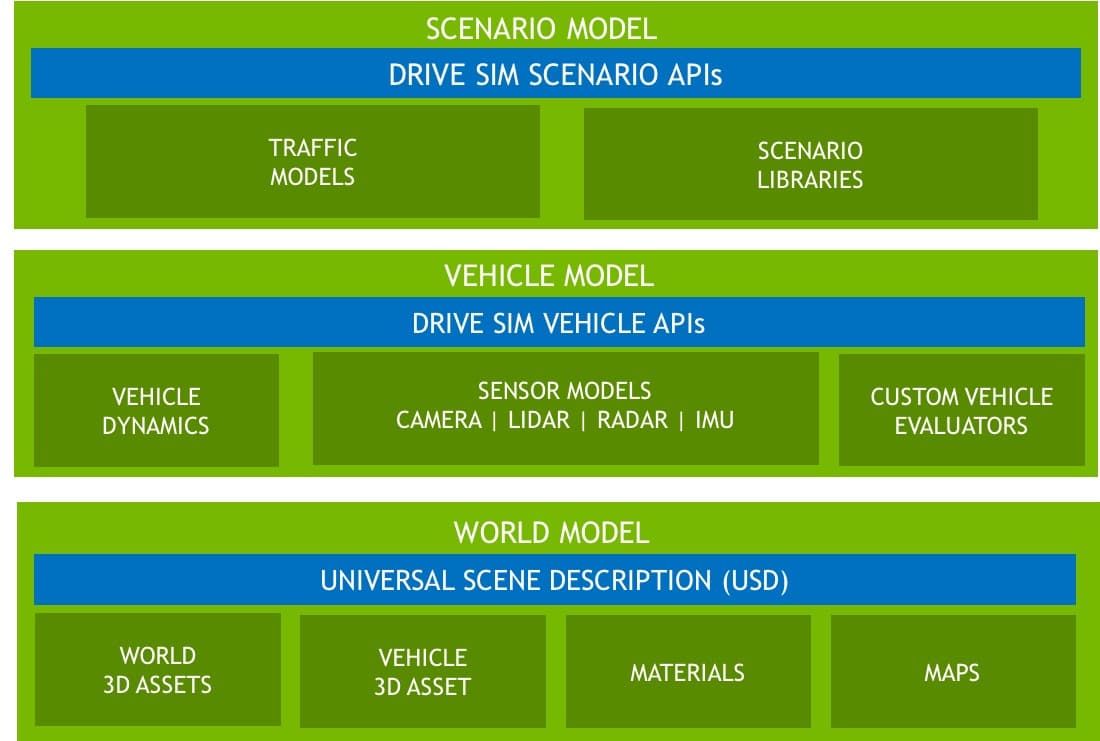
- 環境の SIM モデル:
「ローマは一日にして成らず」と言いますが、仮想都市もまた然りです。たとえば、サンフランシスコでのテストをシミュレーションする場合、開発者はまず地図の作成に取り掛かる必要があります。次に、その地図上にビル、樹木、その他のランドマークを配置します。現実世界を厳密に再現したテスト環境を構築するために、街の細部までインチ単位で反映する必要があります。また、その仮想環境では、明るさから天候まで、現実世界のさまざまな状況をシミュレートする必要もあります。車両は、カリフォルニア州マウンテンビューの快晴の朝から、サンフランシスコの濃霧まで、シミュレーション プラットフォームを離れることなく走行し続けることができるようにします。
- センサーと車両の SIM モデル:
人間とは異なり、自動運転車は視覚情報だけに頼って周囲の世界を認識するわけではありません。レーダー センサーやライダー センサーでカメラ センサーを補完して、判断材料となる車両データを取り込みます。包括的なシミュレーション プラットフォームでは、それらの入力データを再現して、アルゴリズムがさまざまなセンサー入力にいかに反応するかをテストする必要があります。
シミュレーションでは、仮想車両も現実世界と同じ動きを再現できる必要があります。ブレーキを踏む、幹線道路に加速して進入する、でこぼこ道を走るなどの動作は、その車両に実際に起こっているのと同様の車両力学を表現したものとなるべきです。
- 交通とシナリオのモデル:
事故が発生しそうな現実的な状況を生み出す場合、開発者はまず現実世界の事例を観察して再現し、その後、シミュレーターで天候や明るさ、道路などの状況を変更しながらさまざまなシナリオを作成する必要があります。自動運転のハードウェアやソフトウェアをしっかりと検証する上で、多様性は絶対に欠かせません。
また、こうしたシナリオは、各テスト環境の交通作法に忠実でなければなりません。たとえば、ペンシルベニア州ピッツバーグでの運転シミュレーションの場合、十字路では対向車よりも左折する車両が優先される、「ピッツバーグ レフト」と呼ばれる慣例を組み込む必要があるでしょう。
広範なパートナー ネットワーク
DRIVE Sim をパートナー様に公開することで、プラットフォームの奥行と柔軟性を向上させることができます。また、環境、車両、交通の各モデルを統合する機能によって、自律走行車のテストと検証の効果が高まります。
DRIVE Constellation プラットフォームでは、環境モデルの専門家から、車両およびセンサー モデル、交通およびシナリオ モデルの専門家まで、シミュレーションを手掛ける各社がすでに NVIDIA と協業しています。
DRIVE Constellation プラットフォームでは、NVIDIA のシミュレーション パートナー様が協業を進めています。
自律走行車のテストと検証に役立つ、オープンな DRIVE Constellation プラットフォームの詳細についてぜひご確認ください。