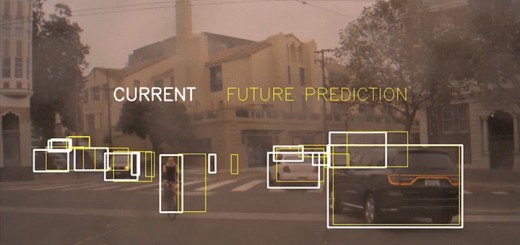
0 Driving DRIVE ラボ: RNN で未来を予測する by Neda Cvijetic / 11 Jun, 2019 ディープラーニングに時系列情報を加えることで、自律走行車が周囲の交通状況に対して未来の動きを予測できるように
0 Driving DRIVE ラボ: 完璧な交差点検出を目指して by Neda Cvijetic / 16 May, 2019 WaitNet ディープ ニューラルネットワークにより、地図に頼らず交差点を特定
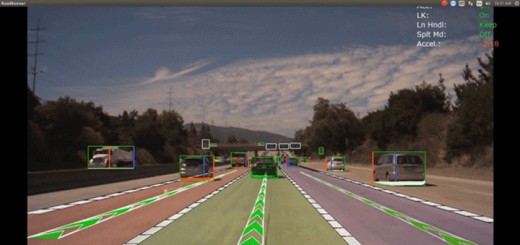
0 Driving DRIVE ラボ: 自律走行車向けの進路認識をNVIDIAがいかに構築しているか by Neda Cvijetic / 13 May, 2019 新しく始まる NVIDIA DRIVE ラボ ビデオ シリーズでは、自律走行の構成要素を詳しく紹介し、DRIVE ソフトウェアの内部に迫ります。
 Chrome
Chrome Firefox
Firefox Opera
Opera Safari
Safari IE
IE