NVIDIA の Jetson AGX Xavier とQuadro RTX 搭載のデータ サイエンス ワークステーションを活用して、データ収集と自律運転車のトレーニングを行い、先進的な AI 手法を学習
MIT (マサチューセッツ工科大学) の生徒たちは、NVIDIA 製品を搭載したデータ サイエンス ワークステーションを駆使して、自動運転について学んでいます。
MIT の学部には、ロボティクスのクラスが設置されています。このクラスの 17 人の生徒は、3 つのチームに分けられ、ミニチュアのレーシング カーを与えられました。彼らに課せられた課題は、そのレーシング カーに自律走行の方法を教え、MIT のスタタ センターの地下に設けられた複雑なコースを走破できるようにすることです。
MIT で航空宇宙工学専攻の准教授を務めるサータック カラマン (Sertac Karaman) 氏は、模倣学習の流れについて生徒たちに教えたいと考えていました。この模倣学習という手法では、人間が示した見本を使って、自動運転モデルのトレーニングを行います。
NVIDIA の Jetson AGX Xavier と Quadro RTX 搭載のデータ サイエンス ワークステーションは、高速な演算機能を提供します。これによって同氏や生徒たちは、AI を使ったさまざまなプロトタイプを作成できるようになっています。

データ サイエンス ワークステーションで学習サイクルを駆動
模倣学習の過程で、生徒たちは TensorFlow のニューラル ネットワークをトレーニングして、自分のレーシング カーに自律運転の方法を教えなければなりません。しかしその前に、まず生徒たちは屋内のコースでできるだけ多くのデータを収集して、スタタ センターの廊下やドアの間を走り回る方法をレーシング カーが学べるようにする必要がありました。
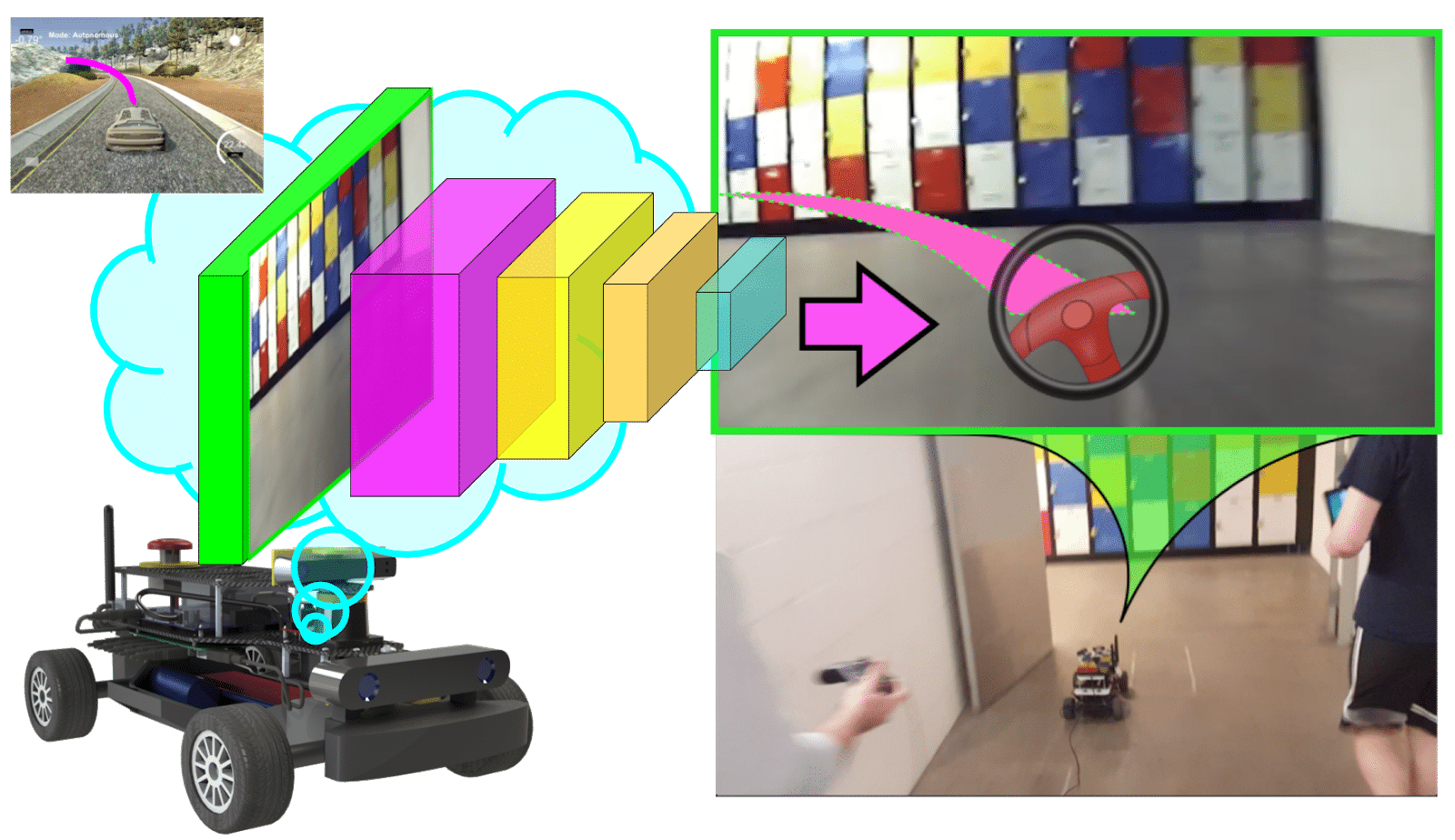
それぞれのレーシング カーには、性能重視の自律動作マシンを想定した組み込みシステム モジュールである NVIDIA Jetson AGX Xavier が搭載されていました。生徒たちはジョイスティックを使って、複雑なコース上でこの小型カーを手動運転し、車体前部に取り付けたカメラを通じてデータの記録を行いました。
それに続いて、NVIDIA の PilotNet アーキテクチャをベースにしたニューラル ネットワークが、記録されたデータを処理し、観察と行動をマッピングする方法を学習しました。こうすることで、レーシング カーはカメラの映像に基づいてハンドルの角度を判断できるようになります。
生徒たちは、NVIDIA Quadro RTX GPU を搭載したデータ サイエンス ワークステーションの高度な演算機能を使って、TensorFlow モデルのトレーニングを行いました。トレーニングしたモデルは、その後ミニチュア レース カーに展開し、デバイス上での AI 推論に利用しました。
このデータ サイエンス ワークステーションは、トレーニングのパフォーマンスを大幅に高速化し、繰り返し作業にかかる時間を大幅に削減しました。これによって生徒たちは、さまざまなモデルのトレーニングとテストを素早く行って、自身のレース カーに最適なモデルを発見できるようになりました。
カラマン氏は次のように述べています。「生徒たちがプロジェクトを成功させられたのは、モデルのトレーニングがこれまで体験したことがないほど早く済んだからです。NVIDIA のデータ サイエンス ワークステーションの高速化された演算機能を活かすことで、クラスでは多くの繰り返し作業を行い、最高のパフォーマンスを発揮するレース カーをわずか数分でトレーニングできました」
カラマン氏は今年も NVIDIA のデータ サイエンス ワークステーションとインストール済みの AI ソフトウェア スタックを使って、ロボティクスの授業を行おうと考えています。
詳細は Quadro RTX を搭載したデータ サイエンス ワークステーションをご覧ください。