ドライバには常に地図が必要でした。それは自律走行車も例外ではありません。実際、精度の高い地図は、自律型ビークルを実現させるために不可欠です。
そこで本日、NVIDIAのCEOであるジェンスン・フアン(Jen-Hsun Huang)がGPUテクノロジ・カンファレンスで発表した、NVIDIAによるエンドツーエンドの自律走行車用マッピング・プラットフォームの登場です。
このシステムは、自動車メーカ、地図会社、スタートアップ企業が迅速にHDマップを作成し、継続して更新できるように設計されており、車載されるNVIDIA DRIVE PX 2、データ・センタではNVIDIA Tesla GPUのコンピューティング能力を使用します。
ファンは次のように述べています。「自動車が安全に自律走行できるようにするには、世界の地図を作成する必要があります。4台のカメラを使用する当社のプラットフォームでは、3D空間のみならず色でも、1秒間に最高180万ポイントの検出が可能で、自律型ビークルに周囲全体の視野を与えます」
道路の行く先をマッピング

オープン・マッピング・プラットフォーム
なぜ自律走行車にとって地図がそれほど重要なのでしょう。朝の通勤を当然のことと考えているかもしれませんが、運転のプロセスは信じられないほど複雑です。
自動車メーカは、複数のセンサからの入力情報を処理し、周辺の環境を正確に理解できる、強力な車載スーパーコンピュータを自動車に装備する必要があります。詳細な地図をこの計算式に加えれば、問題はシンプルになります。
人間のドライバは、次の角で起こりそうなことがわかっていれば、危険に対して用心するよういっそうの注意を払います。自動車自体がドライバであるときも同様です。
NVIDIAのオープン・マッピング・プラットフォームは、NVIDIA DriveWorksソフトウェア・ツールキットを基盤にして構築されます。このツールキットは、ディープラーニングと「vSLAM(visual simultaneous localization and mapping)」として知られる技術を組み合わせ、マッピング・プロセスの各段階に対応します。
マップメイキングの新しいアプローチ
従来のマッピング技術は、大量のデータを収集する高価な車載センサを多数必要とし、その後このデータをオフラインで記録し、処理しなければなりません。これと比べて、当社は、きわめて効率的なシステムを設計し、データ処理のほとんどを自動車内での処理に移行し、クラウドとの通信を最小限にしました。
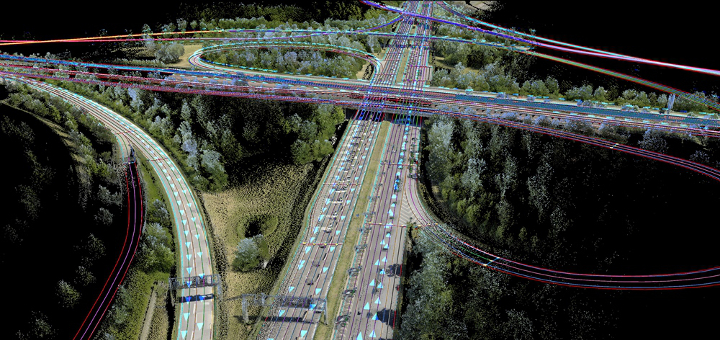
自律走行車を案内するとなると、GPSだけでは十分ではありません。位置を正確に特定する精密さが必要です。SfM(structure from motion)アルゴリズムは、反対に本来は3Dグラフィックスですが、カメラからの2Dデータを豊富な3D情報に変換するのに役立ちます。このマッピング情報と車載の慣性センサからのデータを統合し、GPSを併用すると、重要な目印を正確に位置決めできるようになります。
車線や道路標識のような重要な特徴を検知するためにディープラーニング・アルゴリズムを加えると、地図を作成しつつ、環境の変化を認識できるシステムを手にすることができます。その結果、自律走行に向けて構想を練っている自動車メーカや地図会社にとって、開発を進める上できわめて効率の高いシステムになります。