
2025 年にはロボットの稼働現場がおよそ 6倍になるという予想のなか、DeepMap、Metropolis および ReOpt が 自律動作モバイル ロボットの性能を改善
製造現場や配送センターは、非常に複雑です。新しいイヤホンや靴下が数時間で自宅に届いたり、自動車が生産ラインから出荷されたりするたびに、AI を駆使した物流では魔法のようなことが起こっています。
このような巨大な施設はたえず変化しています。ロボットが数百マイルにわたる通路を進み、数百万個の製品を組み立て、作業する人々のチームを助けます。障害はつねに存在しています。
本日、NVIDIA は、運用効率の最適化および自律動作モバイル ロボットの導入加速を目的とした、Isaac Autonomous Mobile Robot (AMR) プラットフォームを発表しました。Isaac AMR は、NVIDIA Isaac の機能を強化したもので、ロボティクス アプリケーションを構築および展開し、マッピング、現場の分析およびフリートの最適化を NVIDIA EGX で行うことを可能にします。
この種の産業施設は、街区あるいはスタジアムくらいの規模になるケースもあり、その時の製品要件に適合するために、絶えず再構成または拡張されています。自律動作ロボットの経路計画とルート変更は足並みをそろえて行う必要があります。
9兆ドルの規模を誇る物流業界では、経路決定をわずかに最適化するだけで、業界規模で数十億ドルの節約が可能になります。
Interact Analysis によると、自律動作モバイル ロボットが導入される現場の数は、2020 年の 9,000 か所から2025 年には 5万 3,000 か所に増えると予想されています。その一方で、サプライチェーンは人手不足とコロナ禍の制限のなか、増え続ける E コマースへの対応に悩まされています。
障害の 1 つとなっているのは、精度の高いロボット マップを急速かつ自律的に作り出す能力が足りないことです。ロボット マップは、業務の拡大または変動に合わせて、継続的にアップデートする必要があります。また、モバイル ロボットが作業する環境の変化に対応するための状況認識の強化、ならびに経路の継続的な再最適化、さらにこれらを行いながらシミュレーションを通じて新たなスキルセットを構築することは、運営効率の向上に欠かせません。
Isaac AMR は、数年間にわたる NVIDIA の研究と製品開発から生まれました。このフレームワークは、NVIDIA NGC ソフトウェア ハブおよびNVIDIA Omniverse プラットフォーム内から入手することができます。最初はIsaac AMR上で Metropolis と ReOpt を利用することができ、その後 DeepMap やその他の NVIDIA テクノロジも利用できるようになる予定です。
Isaac AMRで業務の規模を拡大
製造現場や配送センターに自律動作モバイル ロボットを展開する際、 AI とコンピューティングにおいて直面する課題は、自律走行車を開発する際の課題とそれほど変わりません。
障害物や人を回避する必要があるほか、目的地に到達しなければなりません。GPUによって加速されたアルゴリズムで作動する数千のセンサーを通じて、いくつもの自律動作ロボットは、絶えず変化する業界のワークフローのなかで、巡回セールスマン問題、つまり複数の目的地を訪問するための最短の経路を探索するという課題を、リアルタイムで解決できるようになります。
Isaac AMR プラットフォームは、NVIDIA Omniverse を使って、AMR が導入される施設のデジタルツインを作成します。Omniverse 上で構築された NVIDIA Isaac Simが、高忠実度の物理演算と認識能力によって、デジタルツイン内のロボット、人々およびその他マシンの振る舞いをシミュレートします。さらに、AI モデル トレーニングのための合成データの生成も可能です。
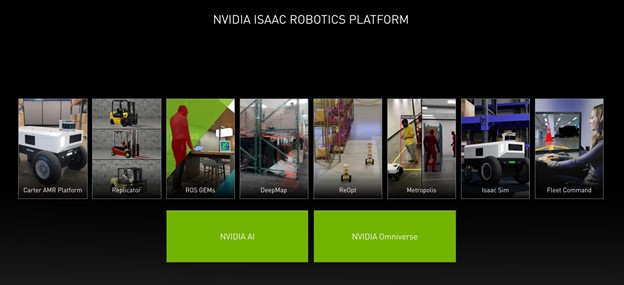
Isaac AMR は、GPUによって加速された AI テクノロジと、DeepMap や ReOpt、Metropolis などの SDK で構成されています。これらのテクノロジは、NVIDIA Fleet Command を通じて、安全に編成され、クラウドで提供されます。
DeepMap がもたらす、マッピングの進歩
NVIDIA による DeepMapの 買収により、AMR 業界も自律走行車でのマッピングの進歩を享受できるようになっています。
AMR 導入の際に、DeepMap プラットフォームのクラウドベース SDK を利用すれば、大規模な施設でのロボット マッピングを数週間から数日に短縮でき、さらにセンチメートル単位の精度も得られます。
DeepMap Update Client により、ロボット マップは、必要に応じて、リアルタイムで頻繁にアップデートされます。さらに、DeepMap SDK は、意味理解を加えることで、マップにインテリジェンスをもたらし、それによって、ロボットはオブジェクトのピクセルが示すものを把握し、経路の進行が可能か判断できるようになります。さらに、室内と室外の両方を対象にしたマップに対処することもできます。
Isaac AMR に組み込まれている NVIDIA DeepMap は、Metropolis、ReOpt、Omniverse上のIsaac Sim など他の要素と統合されています。
NVIDIA Metropolis が、リアルタイムの状況認識機能を提供
マッピングは、環境内のすべてのものを対象としているわけではありません。また、AMR に組み込まれている先進のセンサーが、安全と効率的な運用を必ずしも保証できるわけではない場合もあります。
NVIDIA Metropolis ビデオ解析プラットフォームは、工場または倉庫のフロア全体に配置されているカメラやセンサーを利用することで、リアルタイムに、より高いレベルの「アウトサイドイン (ロボット外部のセンサーによる測定)」の認識機能を提供します。
Metropolis により、AMR は工場フロアでの状況認識をさらに高めることができるようになります。これによって、密集度が高いエリアを避け、死角を排除し、人や他の AMR に対する視認性を向上させることができます。さらに、Metropolis の事前トレーニングされたモデルにより、現場特有のニーズに合わせたカスタマイズを迅速に行うことが可能になります。
物流を変革する、ReOpt ライブラリ
NVIDIA ReOpt AI ソフトウェア ライブラリを使用することで、車両の経路計画と物流の最適化をリアルタイムで行い、その結果をすべての AMR に反映させることができます。
大規模で複雑な環境に導入される、AMRの最適な数を決定する際には、ロボットのスピード、バッテリー寿命、運搬物のサイズと重さ、ならびに施設のレイアウトなど、たくさんの要素を考慮する必要があります。
企業は、Isaac Simを通じてNVIDIA ReOpt を活用することで、 複数の AMR のインタラクションをシミュレートすることができます。このようなシミュレーションは、倉庫などの環境のデジタルツイン内で、迅速かつ正確に行われます。このようなシミュレーションは、状況が変化したときにロボットを実稼働させる前に行うことができるので、時間と費用の節約にもなります。
ロボットが導入されると、業務効率を最大化するために、経路の継続的な再最適化が必要となります。NVIDIA ReOptは、多くの制約に基づき、多様なAMRのフリートに対する経路の動的な再最適化を提供します。
量産に向けたAMR の導入
NVIDIA EGX サーバーで利用できる、Isaac AMR プラットフォームは、産業向けロボットおよび人間とロボット両方のシミュレーション、ならびに経路の最適化を行うための包括的な架け橋として機能し、AI ドリブンの物流の開発を促進します。
NVIDIA Isaac AMR プラットフォームは、エンタープライズ クラスで、クラウド対応です。Isaac AMR を構成する NVIDIA のテクノロジは、NVIDIA Fleet Command を使用して EGX サーバーに安全に展開および管理することができます。
Omniverse、Metropolis、DeepMap および ReOpt の最新情報のほか、Isaac Robotics プラットフォームについての詳細もご確認ください。