Chrome
Chrome Firefox
Firefox Opera
Opera Safari
Safari IE
IE
WaitNet ディープ ニューラルネットワークにより、地図に頼らず交差点を特定
編注: これは「NVIDIA DRIVE ラボ」シリーズの 2 本目のブログです。このシリーズでは、自律走行車にまつわるさまざまな課題、および NVIDIA DRIVE AV ソフトウェア チームがそれらにどのように対処しているかについて、エンジニアの観点から迫ります。進路認識に関する 1 本目のブログは、こちらをご覧ください。
ミッション: AI ベースのライブ認識を用いた交差点検出
アプローチ: WaitNet ディープ ニューラルネットワーク
信号機で制御された交差点を通過するのは、ありきたりなことに見えるかもしれません。しかし、「BB8」という愛称で親しまれているNVIDIAの自動運転のテストカーが昨年そのタスクを初めてやってのけたとき、エンジニアたちの顔に笑みがこぼれました。
それもそのはずです。AI ベースのライブ認識を行うディープ ニューラルネットのみを使って、交差点を検出し、停止し、通過することができたからです。しかも、ピンポイントの正確性を実現できました。
このアプローチでは、AI ベースのシーン理解に基づき、交差点をリアルタイムで認識し、分類しました。個別の特徴 (一時停止標識、信号機、車線境界線など) を検出し、まとめることで交差点と判断するのではなく、WaitNet ディープ ニューラルネットワーク (DNN) を用いることにより、シーンベースの検出と分類を行うことができたのです。
WaitNet は、そのミッションから命名されました。すなわち、自律走行車が停止し、待機(Wait)しなければならない諸条件を検出するということです。カメラ画像のデータでトレーニングを実施した畳み込み DNN により、待機が必要となるさまざまな状況 (交差点、工事現場、料金所など) を推測し、これらを分類します。
これらの結果は、より高次の自律走行車ソフトウェア モジュール (マッピング コンポーネントや行動計画コンポーネントなど) への入力データとして用いられます。
人間による検出の仕組みと類似
WaitNet による交差点の検出および分類プロセスは、人間が視覚的に交差点を検出する仕組みと似ています。シーン全体は、独立した個別の目印ではなく、通常とは異なる場所や位置にある一時停止標識、信号機、車線境界線などの数多くの特徴によって構成されています。人間の視覚系はこのシーン全体を認識し、交差点の有無や種類を検出します。

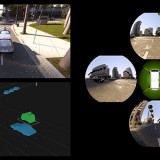
WaitNet DNN を用いたシーンベースの交差点検出(黄色で可視化)。信号機検出は紫色で可視化。
シーンベースの認識で AI を用いることのメリットとしては、視覚的な特徴と全体的な交差点の認識との関係性の有無を手動で判断する必要性や、それらの特徴がどの交差点の種類と合致するかについてのルールをハードコーディングする必要性をなくせることが挙げられます。このようなケースバイケースの総当たり的なアプローチは、拡張性が不十分です。世の中には交差点の種類が多すぎるからです。
さらに、個別の特徴に過度に依存しない仕組みであるため、個別の特徴に関連した検出エラー (例えば、一時停止標識を検出できなかった結果、交差点全体の検出に失敗すること) が増えるリスクを抑えることができます。また、交差点の場所や種類を示す地図のみに依存する必要がなくなるため、地図の不完全性や誤りに起因する脆弱性を低減させることができます。
次の DRIVE ソフトウェア リリースで提供開始
交差点、および交差点までの距離を検出できる WaitNet の機能は、社内プロジェクトで開発されましたが、NVIDIA DRIVE ソフトウェア 9.0 リリースの一部として、数週間後に提供が開始される予定です。
DRIVE Hyperion キット (NVIDIA の自律走行車向けセンサーとコンピューティングのためのプラットフォーム) と WaitNet ベースの認識機能を使用すれば、ほとんどの交差点を最大 150 メートル手前で検出することが可能になります。これにより、車両が交差点に近づく際の検出範囲がより広がり、余裕をもってブレーキをかけられるようになります。
交差点までの距離が近い場合、WaitNet により停止位置が正確に検出されます。これは特に都市郊外や都市において有用な機能です。このような環境では、マルチパスの影響で GPS 信号の正確性が低下するためです。
WaitNet ベースの他の機能 (例えば、画像フレーム 1 枚あたりで複数の交差点、信号機、道路標識を検出できる機能など) も、今後のソフトウェア リリースで提供される予定です。
AI ベースのライブ認識により、シーンやコンテキストに基づいて交差点を把握し、通過することが可能になることは、DRIVE ソフトウェアの堅牢性に必要不可欠な要素が加わることであり、より安全で優れた自律走行につながります。